主要内容
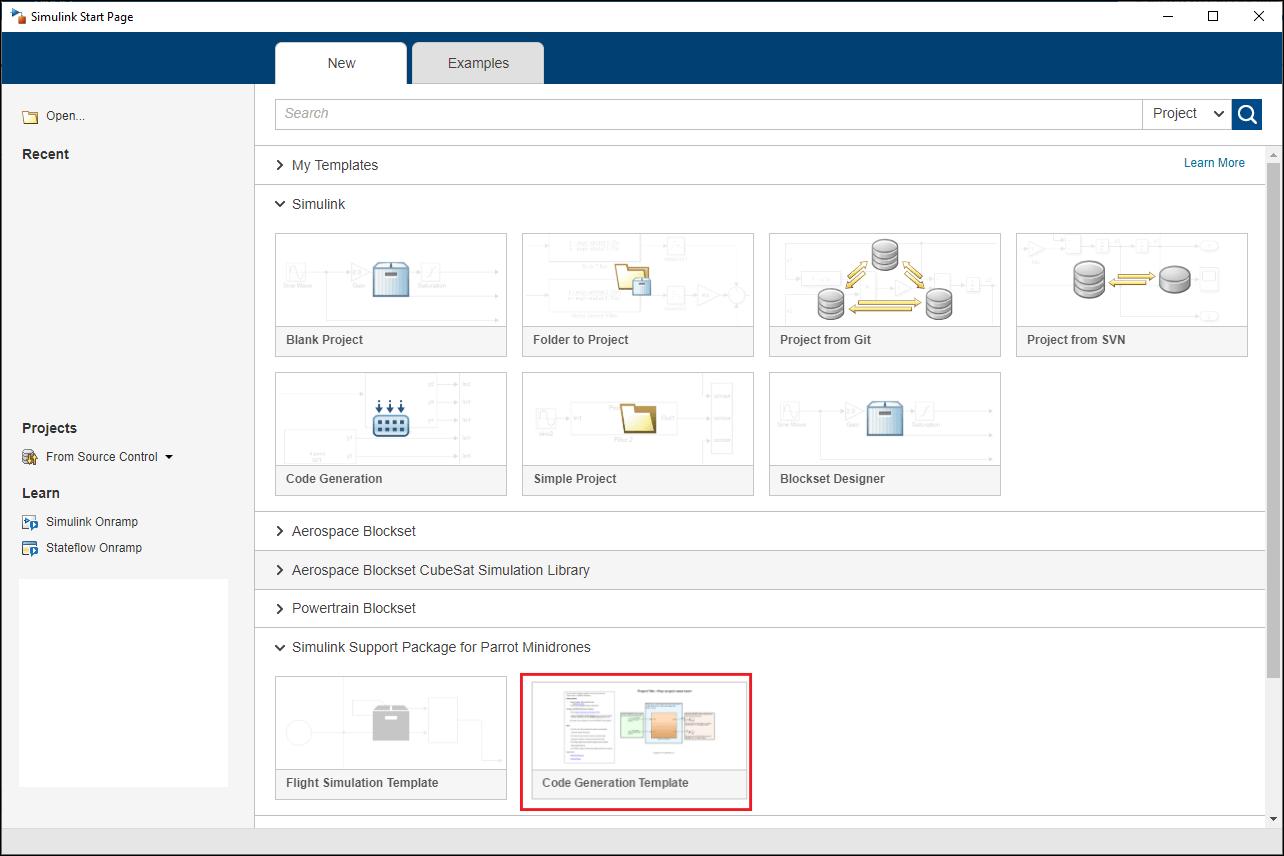
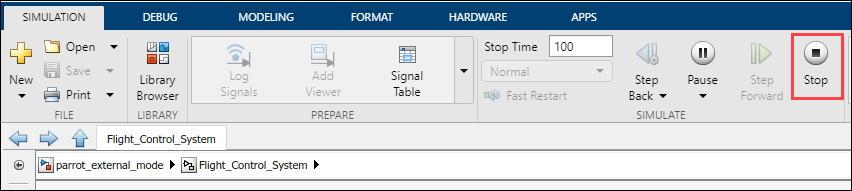
建模
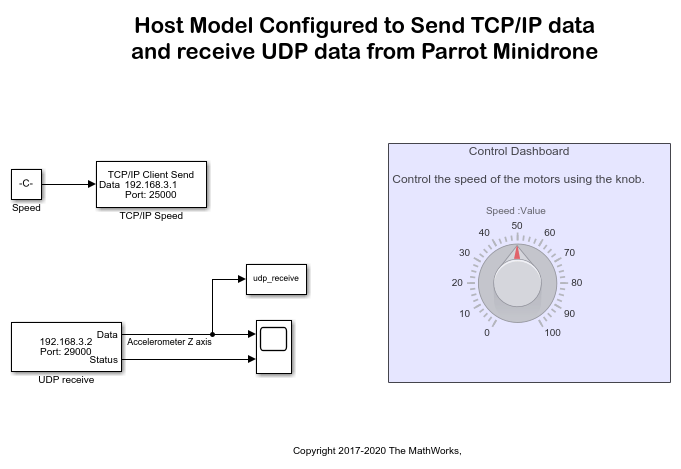
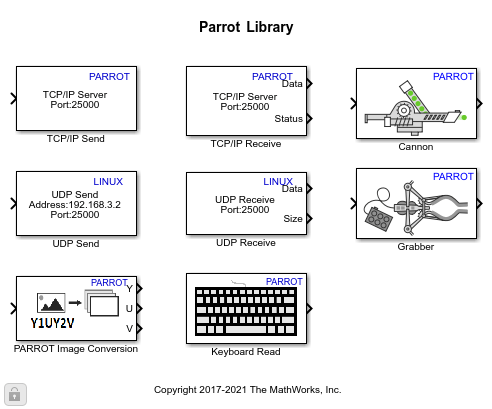
为硬件连接准备模型,添加支持硬件协议的块万博1manbetx
块
| TCP / IP接收 | 通过TCP/IP网络从远程主机接收数据 |
| TCP / IP发送 | 通过TCP/IP网络向远程主机发送数据 |
| UDP收到 | 从UDP主机接收UDP消息 |
| UDP发送 | 发送UDP消息到UDP主机 |
| 鹦鹉图像转换 | 转换编码Y1UY2V图像格式为YUV或RGB格式 |
| 键盘读 | 接收主机键盘上的按键,输出ASCII码 |
| 强夺者 | 控制Grabber模块连接到鹦鹉Mambo minidrone |
| 大炮 | 控制连接到a的炮炮模块鹦鹉Mambo minidrone |
主题
用于在Parrot上创建和运行应用程序的参数和配置选项®MiniDrone.
特色的例子
您还可以从以下列表中选择一个网站: