자율주행시스템을위한MATLAB및的Simu万博1manbetxlink
자동차엔지니어는감지,경로계획및센서융합과제어를포함한자율주행시스템기능을설계하기위해MATLAB®및仿万博1manbetx真软件®를사용합니다。MATLAB및Si万博1manbetxmulink的로할수있는작업은다음과같습니다。
- 제공되는컴퓨터비전,LIDAR및레이더처리,센서퓨젼알고리즘,센서모델및앱을사용하여감지시스템을개발합니다。
- 완벽완벽조립된어플리케이션예제를사용하여3d환경에서제어시스템과모델차량설계합니다。
- 가상센서모델을사용하여주행시나리오를작성하여시스템을테스트하고검증합니다。
- 자율주행관련시각화를사용합니다。
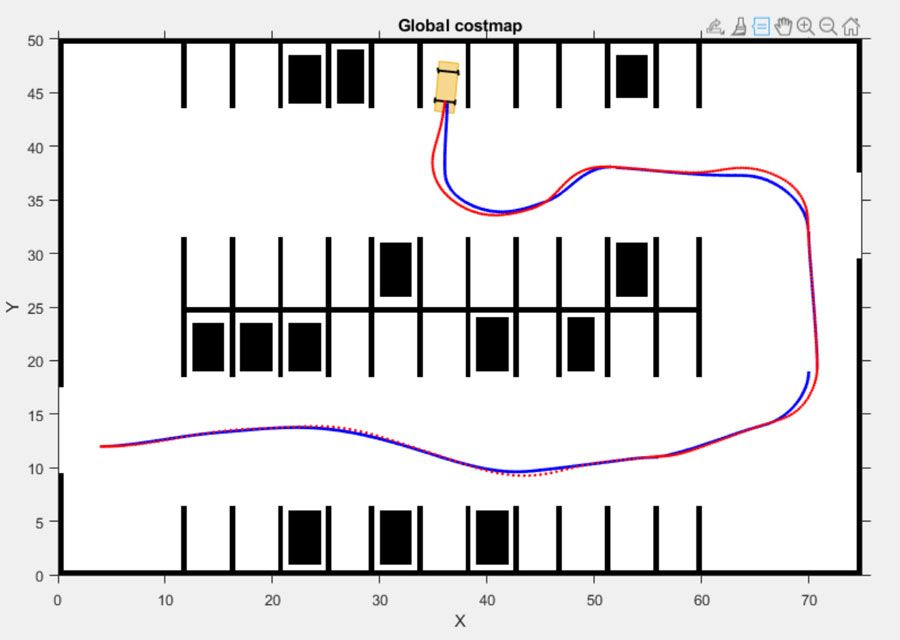
- 차량비용맵과모션계획알고리즘을설계하여주행경로를계획합니다。
- ISO 26262를준수하는데필요한엔지니어링노력을줄입니다。
- 코드생성제품을사용하여신속한프로토타이핑및边境테스트를위해C코드를자동생성합니다。
“MATLAB은알고리즘설계와개선을빠르게할수있어제가선호하는툴입니다。데이터분석,알고리즘개발,알고리즘시각화및시뮬레이션을한곳에서수행한다음소프트웨어엔지니어가더큰시스템내에서통합할때신뢰할수있고효율적인Ç코드를간편하게생성할수있습니다“。
梁妈妈,德尔福



감지설계및테스트
MATLAB은은컴퓨터,LIDAR처리,레이더및및센서을위해알고리즘과센서모델제공제공제공제공제공포인트포인트와확장물체추적기추적기를포함추적数据协会기술기술이브러리를사용하여센서융합을수행합니다센서융합을수행수행IMU / GPS센서의측정값을이션하고하고차량위치와을추정하기위한융합과위치알고리즘을설계설계
딥러닝딥러닝머신러닝을사용하여하여보행자,차선감지및주행가능경로추정용알고리즘을합니다。
地面实况标签앱을사용하여地面实况데이터를알고리즘출력과비교하여감지시스템성능을테스트합니다。

고객성공사례
- 毛虫标签相机数据。(18:47)
방법알아보기 - 自动化标签LiDAR数据。(14:05)방법알아보기。
- 斯堪里亚用预订a을개발하는방법융합을하는하는방법。
제품소개
访问、可视化和标记数据
您可以使用can和ROS的MATLAB接口访问实时和记录的驾驶数据。使用内置工具,您还可以可视化和标记导入的数据。例如,ground truth labeler应用程序提供了一个界面来可视化和交互式地标记多个信号,或者您可以自动标记这些信号,并将标记的数据导出到您的工作空间。
要访问和可视化地理地图数据,您可以使用HERE HD Live Maps和OpenStreetMap®.

驾驶模拟场景
你可以使用长方体和虚幻引擎®MATLAB在虚拟场景中开发和测试算法的仿真环境。
长方体环境代表演员的简单图形,并使用概率性传感器的机型。您可以使用控制器,传感器融合和运动规划这个环境。
使用虚幻引擎环境,您可以开发用于感知和长方体环境的算法。Roadrunner让您设计与模拟器一起使用的场景,包括Carla,Vires VTD和NVIDIA Drive SIM®以及Matlab和Simulink。万博1manbetxRoadrunner还支持出口到万博1manbetx行业标准文件格式,如FPX和Opendrive®.
设计规划和控制算法
利用MATLAB和Simulink万博1manbetx,可以开发路径规划和控制算法。您可以使用横向和纵向控制器设计车辆控制系统,使自动车辆能够遵循规划的轨迹。
您还可以使用传感器模型和车辆动力学模型合成来测试您的算法以及2D和3D仿真环境。
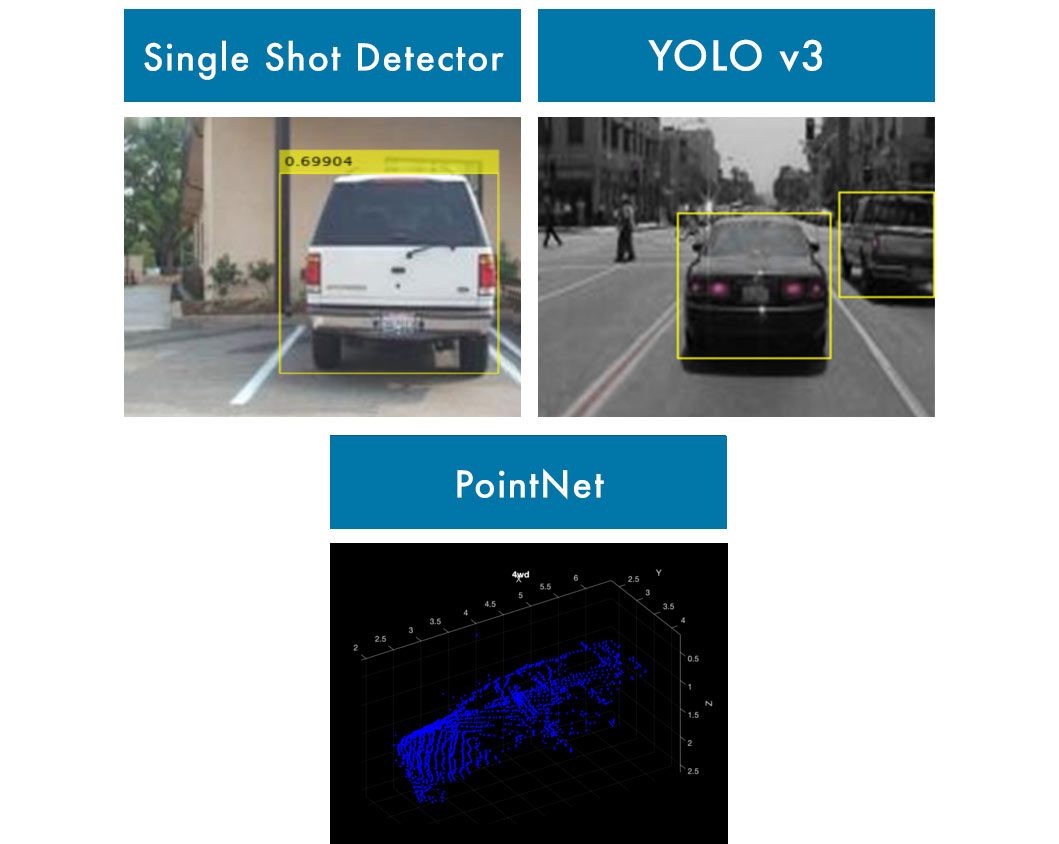
设计感知算法
您可以开发感知算法,例如使用相机,激光器和雷达的数据。感知算法包括检测,跟踪和本地化,您可以用于自动制动,转向,地图建筑和内径型等应用。
您可以将这些算法实现为紧急制动和转向等ADAS应用程序的一部分。
使用MATLAB,可以开发传感器融合、同步定位和测绘(SLAM)、地图构建和里程计的算法。
部署算法
您可以使用代码生成工作流将感知、规划和控制算法部署到硬件上。万博1manbetx支持的代码生成语言包括C、c++、CUDA®,Verilog.®和vhdl.®.
您还可以将算法部署到面向服务的体系结构中,如ROS和AUTOSAR。
使用自动生成的代码,可以将传感器与其他ECU组件连接。支持几个部署目标,包括来自Nvidia,英特尔的硬件万博1manbetx®, 手臂®, 和更多。
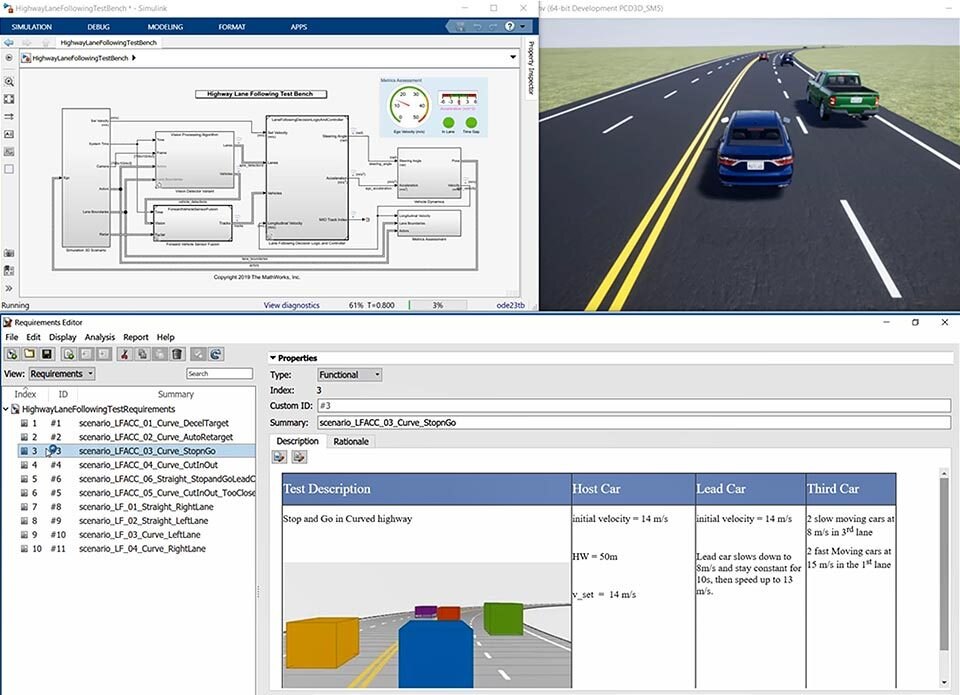
集成和测试
您可以集成和测试你的感知,计划和控制系统。使用Simu万博1manbetxlink要求™,您可以捕捉和管理您的要求。您还可以使用Simulink的测试万博1manbetx™并行运行和自动化测试用例。

让我们知道我们可以如何帮助你。
联系我们进行自定义评估,并根据您的需求获得定价。

有问题吗?
与自动化驾驶专家交谈。

제어설계및테스트
AEB(자동긴급제동),LKA(차선유지지원),ACC(자동순항제어)및자동주차와같은자율주행기능을위한제어기를개발합니다。ACC,LKA및장애물회피와같은시나리오를위해사전구축된기능과블록으로자율주행어플리케이션전용模型预测控制器를설계합니다。
레이더및카메라센서모델에서작성된시나리오와가상물체감지신호를사용하여자율주행알고리즘을테스트합니다。주행시나리오디자이너앱을사용하여하여,액터및센서를정의。사전구축된欧元ncap테스트와opendrive®도로망을가져옵니다。
고객성공사례
- 航程에서자율주행택시용종방향제어를개발한방법을알아보십시오。
- 日立에서ACC용.模型预测控制器를개발하는방법을확인하십시오
- mobileye에서실시간하드웨어의ADAS알고리즘을프로토타이핑하는방법을알아보십시오。
경로계획및위치파악
차량비용맵과모션계획알고리즘을사용하여주행경로를계획합니다。ROS工具箱™의인터페이스를사용하여ROS에서경로계획기술에액세스할수도있습니다。IMU와GPS센서의데이터를사용하여차량위치와방향을추정합니다。


시뮬레이션기반테스트
주행시나리오이너앱을사용하여자율주행알고리즘을테스트합니다。이앱을사용용euroncap을포함하여시나리오작성하거나사전구축된시나리오불러올수있습니다。통계통계이더와와카메라카메라모델에서감지를생성하고하고하고또는를를또는또万博1manbetx는또는또는에서에서에서을분석분석분석
어플리케이션예제와3 d환경을사용하여ADAS와자율주행기능을위한가상테스트기반을개발합니다。차량모델에는가상카메라가있어시뮬레이션중에이미지를다시仿真软件로보냅니다万博1manbetx。万博1manbetx仿真软件에서신호를분석하여차선감지알고리즘을테스트합니다。虚幻引擎편집기의장면을커스터마이징하면ADAS와자율주행기능을완벽하게사용하는시나리오를만들고시뮬레이션할수있습니다。
코드예제및비디오
- 주행시나리오튜토리얼
- 비전센서감지모델링
- 단안카메라인식을이용한차선추종제어
- 실실驾驶in-look시뮬레이터구축(25:38)
- 자율주행시스템의시나리오기반가상검증(55:31)

도와드릴방법을알려주십시오。
고객맞춤형평가를원하시거나필요에따른가격을알아보려면연락해주십시오。