Matlab和Simu万博1manbetxlink.
对于机器人
将机器人的想法和概念转换为自主系统,在现实世界环境中无缝地工作。

机器人研究人员和工程师使用Matlab和Simulink设计和调整算法,模型现实世界系统,并自动生成万博1manbetx代码 - 全部来自一个软件环境。
使用Matlab和Simulin万博1manbetxk,您可以:
- 连接并控制您的机器人使用您开发的算法。
- 开发硬件 - 不可知的算法并连接到机器人操作系统 -都罗斯和ROS2.。
- 连接到A.传感器和执行器的范围因此,您可以发送控制信号或分析许多类型的数据。
- 消除手工编码通过在许多语言中自动生成嵌入式目标的代码,如C / C ++,VHDL / Verilog,结构化文本和CUDA等多种语言。
- 连接到低成本硬件,如Arduino和Raspberry PI使用预先构建的硬件支持包。万博1manbetx
- 简化设计评论通过创建可共享的代码和应用程序。
- 使用遗留代码和与现有的机器人系统集成。

特色:机器人和自治系统
观看机器人实例

使用Matlab和Simulink简化机器人和地面车道规划和导航的复杂任务。万博1manbetx此演示通过仅使用三个组件模拟自治机器人:路径,车辆模型和算法之后的路径。
跟着:


了解更多
探索产品s manbetx 845





规划和决策
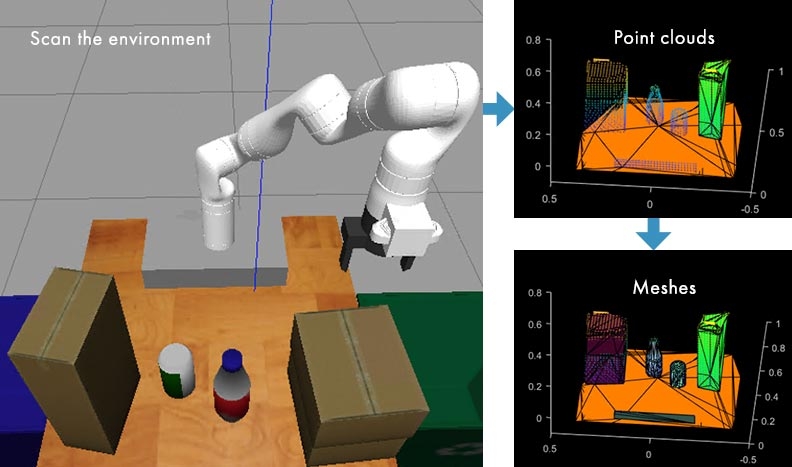
使用LIDAR传感器数据创建环境的地图同时本地化和映射(SLAM)。
通过设计算法导航受限环境路径和运动规划。使用路径规划仪在任何给定地图中计算无障碍路径。
设计算法,允许机器人在面对不确定性时做出决定在协作环境中执行安全操作。实行国家机器定义决策所需的条件和行动。



与其他平台和目标进行沟通
使用包括CAN,EtherCAT和802.11的几种协议与嵌入式目标进行通信。使用数字,RF和其他无线技术连接到支持TCP / IP,UDP,I2C,SPI,Modbus和蓝牙串行协议的硬件。万博1manbetx
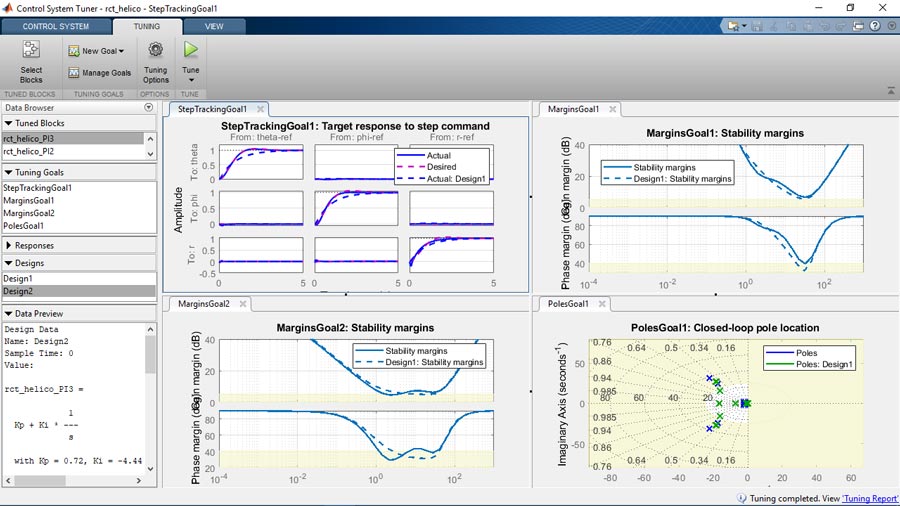
“使用MATLAB和Simulin万博1manbetxk,我们可以使用单个环境进行控制算法开发,调试,数据分析以及更多 - 而不是在多个工具之间切换。该集成可降低整体项目开发时间和引入错误的机会。“
John Wen博士,Rensselaer理工学院




使用MathWorks咨询服务启动并运行
您的团队是否刚刚开始,或者您是经验丰富的Matlab和Simulink用户,Mathworks咨询服务与您合作,开发定制计划并加快项目开发。万博1manbetx通过个性化辅导和完全透明的方法,我们的目标是让您控制您改进的流程,工具和设计工作。

获得免费试用
在你的指尖探索30天。

有问题吗?
与机器人专家交谈。
