MATLAB和Simu万博1manbetxlink的
无人驾驶飞行器
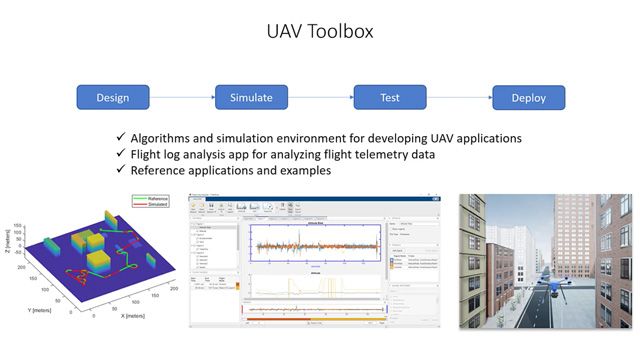
MATLAB®和仿真软万博1manbetx件®为加速无人机(UAV)和自主飞行应用的发展提供能力。
使用MATLAB和Simulin万博1manbetxk,您可以:
- 对无人机系统体系结构进行建模和分析
- 设计飞行控制算法,并在包含环境因素的情况下,用无人机植物模型进行仿真
- 利用预先构建的算法、传感器模型、计算机视觉、激光雷达和雷达处理以及传感器融合应用程序,开发自主飞行的感知和运动规划系统
- 在闭环三维仿真环境中评估无人机性能
- 自动生成生产代码部署到飞行控制器和机载计算板
- 通过MATLAB和Simulink连接并控制无人机万博1manbetx
- 分析无人机飞行遥测和有效载荷数据
“使用Simulink进行建模和仿真是我们获得所需结果的唯一万博1manbetx途径,而且速度和质量也符合当今行业的预期。如果我们必须手工完成所有工作,并且只依赖飞行测试,那么我们将需要更多的bug修复迭代,并且每个迭代需要更多的测试时间。这个问题将变得棘手。没有别的办法了。”
Jan Vervoorst英特尔
使用MATLAB和Simulink万博1manbetx
无人机发展


无人机平台开发
使用MATLAB和Simulink万博1manbetx,您可以建模和分析无人机系统架构,同时链接到需求。你可以设计和测试你的飞行控制算法与工厂模型在模拟没有硬件和降低风险之前的飞行测试。飞行控制软件的生产代码可以自动生成,用于硬件实现。MATLAB和Simu万博1manbetxlink使您:

探索产品s manbetx 845

感知和定位
要实现自主飞行,无人机必须具备自我意识和态势感知能力。MATLAB和Simu万博1manbetxlink提供了预构建算法和传感器模型,用于建筑目标检测、绘图和定位应用。模拟IMU/GPS传感器读数,设计融合和定位算法来估计无人机的位姿。使用深度学习和机器学习来开发对象和人检测的算法,或构建使用无人机进行视觉检测的应用程序。使用MATLAB和Simulin万博1manbetxk,您可以:
基于仿真的测试
使用仿真可以在虚拟测试中检测设计错误,并降低硬件飞行测试的风险和成本。您可以在MATLAB和Simulink中集成无人机植物模型、飞行控制和自主飞行算法,然后执行和自动化仿真测试。万博1manbetx你也可以在逼真的仿真环境中为自主无人机应用的闭环仿真合成传感器读数。MATLAB和Simu万博1manbetxlink使您:
探索产品s manbetx 845
相关应用和主题

30天的免费试用
开始
有问题吗?
和机器人专家谈谈。