主要内容
d2c
将模型从离散时间转换为连续时间
描述
例子
将离散时间传递函数转换为连续时间
创建以下离散时间传递函数:
H = tf([1 -1],[1 1 0.3],0.1);
模型的采样时间为 .
导出一个连续时间,零阶保持的等效模型。
Hc = d2c (H)
Hc = 121.7 - 8.407 e-13 --------------------- s ^ 2 + 12.04 + 776.7连续时间传递函数。
将得到的模型离散化,Hc,采用默认的零阶保持方法,采样时间0.1s返回原始离散模型,H.
c2d (Hc, 0.1)
ans = z - 1 ------------- z^2 + z + 0.3采样时间:0.1秒
使用Tustin近似方法进行转换H到连续时间模型。
Hc2 = d2c (H,“tustin”);
将得到的模型Hc2离散化,得到原始的离散时间模型,H.
c2d (Hc2, 0.1,“tustin”);
将确定的离散时间传递函数转换为连续时间
估计一个离散时间传递函数模型,并将其转换为连续时间模型。
负载iddata1sys1d =特遣部队(z1 2“t”, 0.1);sys1c = d2c (sys1d,“zoh”);
估计一个连续时间传递函数模型。
sys2c =特遣部队(z1, 2);
比较sys1c直接估计连续时间模型,sys2c.
比较(z1, sys1c sys2c)
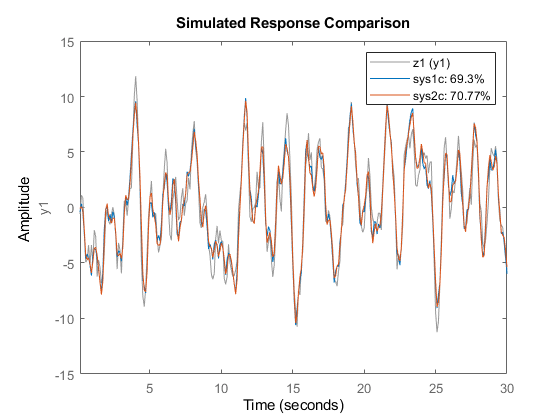
这两种体系几乎完全相同。
转换为连续时间模型后重新生成协方差信息
将辨识的离散时间传递函数模型转换为连续时间传递函数模型。
负载iddata1sysd =特遣部队(z1 2“t”, 0.1);sysc = d2c (sysd,“zoh”);
sys1c没有协方差信息。的d2c操作导致识别模型的协方差数据丢失。
使用使用相同的估计命令和估计数据的零迭代更新重新生成协方差信息。
选择= tfestOptions;opt.SearchOptions.MaxIterations = 0;sys1c =特遣部队(z1、sysc选择);
分析其对频率响应不确定性的影响。
h = bodeplot (sysd sys1c);showConfidence (h, 3)
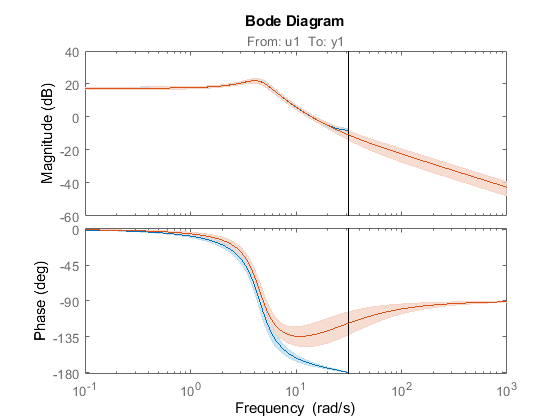
的不确定性sys1c和sysd可与奈奎斯特频率相媲美。然而,sys1c在估计数据不能提供任何信息的频率范围内显示出很大的不确定性。
如果您不能访问估计数据,请使用translatecov命令,该命令是基于高斯近似公式的跨模型类型转换操作的协方差转换。
输入参数
输出参数
参考文献
富兰克林,g.f.,鲍威尔,D.J.,和沃克曼,m.l.,动态系统的数字控制(第三版),Prentice Hall, 1997。
[2] Kollár, I., G.F. Franklin,和R. Pintelon,“关于系统识别中的z域和s域模型的等价性”,IEEE论文集®仪表与测量技术会议,比利时布鲁塞尔,1996年6月,第1卷,第14-19页。
另请参阅
汇集|模型转换速率|d2cOptions|logm|translatecov(系统辨识工具箱)
之前介绍过的R2006a
你也可以从以下列表中选择一个网站:
