主要内容
D2C.
将模型从离散转换为连续时间
描述
例子
将离散时间传递函数转换为连续时间
创建以下离散时间传输功能:
H = TF([1 -1],[1 1 0.3],0.1);
模型的采样时间是 。
导出连续时间,零阶持有等效模型。
HC = D2C(H)
HC = 121.7 S - 8.407E-13 ------------------- S ^ 2 + 12.04 S + 776.7连续时间传输功能。
离散结果模型,HC.,默认零级保持方法和采样时间0.1s返回原始的离散模型,H。
C2D(HC,0.1)
ans = z - 1 ------------- ^ 2 + z + 0.3采样时间:0.1秒离散时间传递函数。
使用Tustin近似方法转换H到连续时间模型。
HC2 = D2C(H,'tustin');
离散化结果模型HC2,以获得原始离散时间模型,H。
C2D(HC2,0.1,'tustin');
将确定的离散时间传递函数转换为连续时间
估计离散时间传输函数模型,并将其转换为连续时间模型。
加载Iddata1.sys1d = tfest(z1,2,'ts',0.1);sys1c = d2c(sys1d,'ZOH');
估计连续时间传递函数模型。
sys2c = tfest(z1,2);
比较响应sys1c.和直接估计的连续时间模型,sys2c.。
比较(Z1,SYS1C,SYS2C)
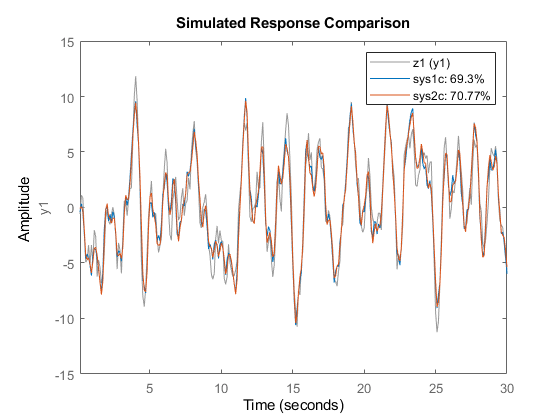
这两个系统几乎相同。
转换到连续时间模型后重新生成协方差信息
将识别的离散时间传输函数模型转换为连续时间。
加载Iddata1.sysd = tfest(z1,2,'ts',0.1);SYSC = D2C(SYSD,'ZOH');
sys1c.没有协方差信息。这D2C.操作导致识别模型的协方差数据丢失。
使用具有相同估计命令和估计数据的零迭代更新重新生成协方差信息。
选择= tfestoptions;opt.SearchOptions.maxIterations = 0;SYS1C = TFEST(Z1,SYSC,OPT);
分析对频率响应不确定性的影响。
h =贝波特(SYSD,SYS1C);展览(H,3)
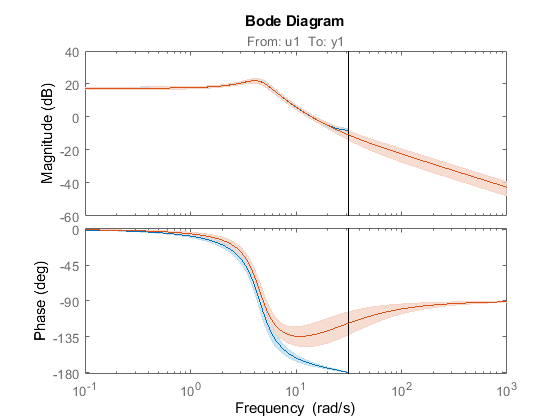
不确定性sys1c.和SYSD.与奈奎斯特频率相当。然而,sys1c.在估计数据不提供任何信息的频率范围内表现出大的不确定性。
如果您无权访问估计数据,请使用翻译命令是基于模型类型转换操作的高斯近似公式的基于转换的转换。
输入参数
输出参数
参考
[1]富兰克林,G.F.,Powell,D.J。和工人,M.L.,动态系统的数字控制(第3版),Prentice Hall,1997。
[2]Kollár,I.,G.F.富兰克林和R.Pintelon,“在系统识别中的Z域和S域模型的等价”,“IEEE的诉讼程序®仪表和测量技术会议,布鲁塞尔,比利时,1996年6月,卷。1,pp。14-19。
在R2006A之前介绍
您还可以从以下列表中选择一个网站:
