PID控制器(PID调谐器)
这个例子展示了如何设计一个两自由度(2-DOF) PID控制器PID调谐器。该示例还2- DOF控制器的性能进行比较,以用1自由度PID控制器实现的性能。
在本例中,您将该植物表示为线性时不变模型。参阅有关使用PID调谐器调一个PID控制器(2自由度)阻挡在Simulink万博1manbetx中®模型中,看到设计双学位的自由度PID控制器(万博1manbetx仿真软件控制设计)。
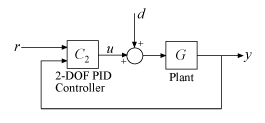
二自由度PID控制器包括比例项和导数项的设定值加权。与一自由度PID控制器相比,二自由度PID控制器在不增加超调量的情况下,能较好地抑制干扰。一个典型的控制架构使用2-DOF PID控制器如下图所示。
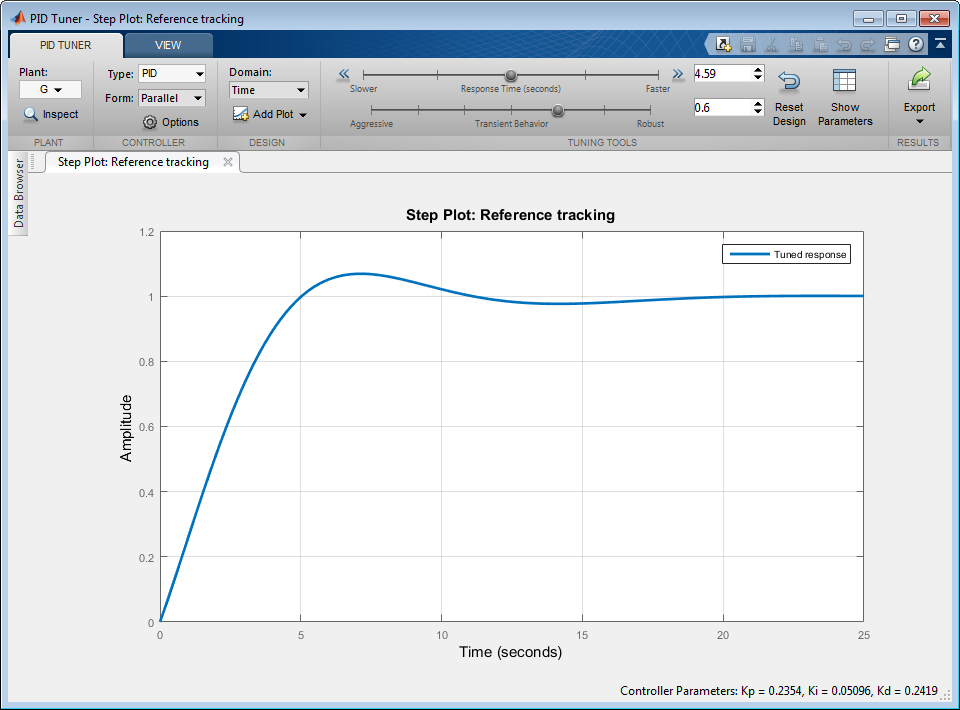
对于这个例子,首先设计用于通过给定的植物中的1自由度控制器:
G = TF(1,[1 0.5 0.1]);pidTuner(G 'PID')
对于本例,假设您的应用程序需要比PID调谐器最初的设计。的旁边的文本框中响应时间滑块,输入2。
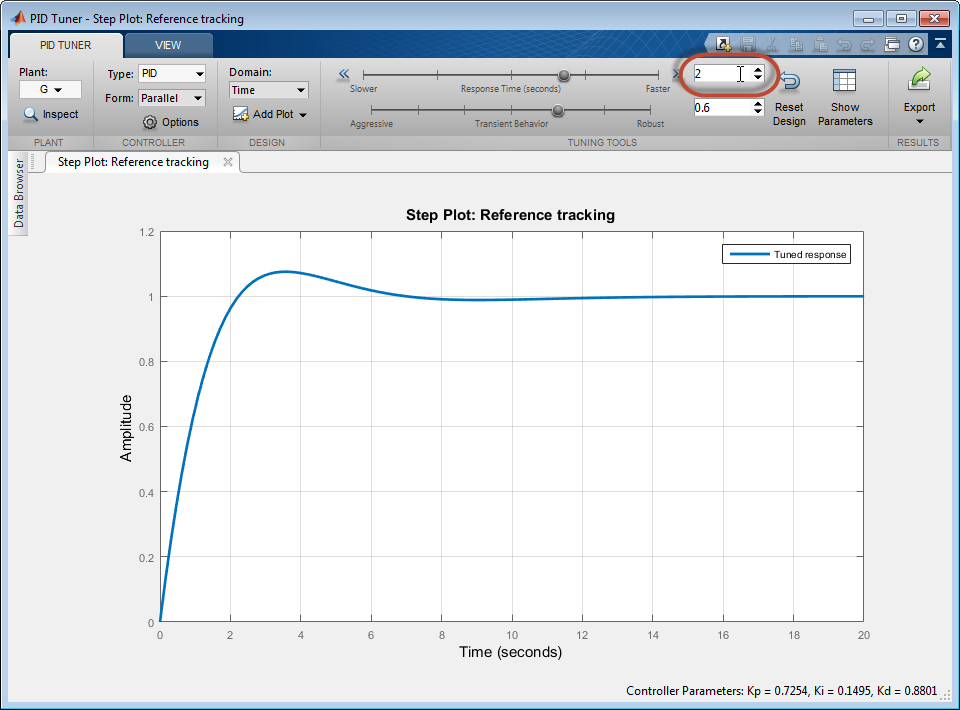
结果的响应很快,但是有相当数量的超调。设计一个2自由度控制器来改善超调。首先,将1-DOF控制器设置为比较的基线控制器。单击出口箭头![]() 并选择
并选择另存为基准。

设计了二自由度控制器。在类型菜单中,选择PID2。

PID调谐器产生与相同的靶响应时间的二自由度控制器。在右下角显示,显示的控制器参数PID调谐器曲调所有控制器的系数,包括额定权重b和c,以平衡性能和健壮性。将2自由度控制器的性能(实线)与作为基线存储的1自由度控制器的性能(虚线)进行比较。
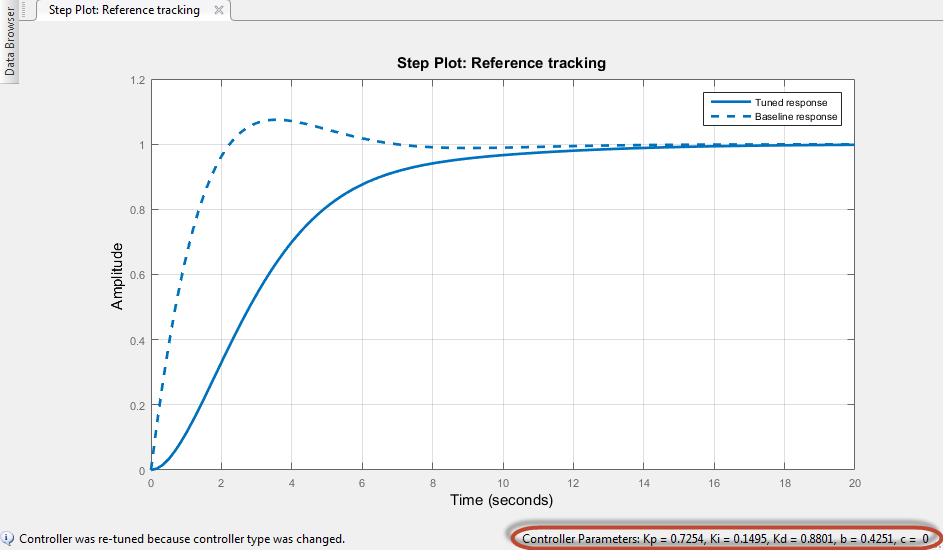
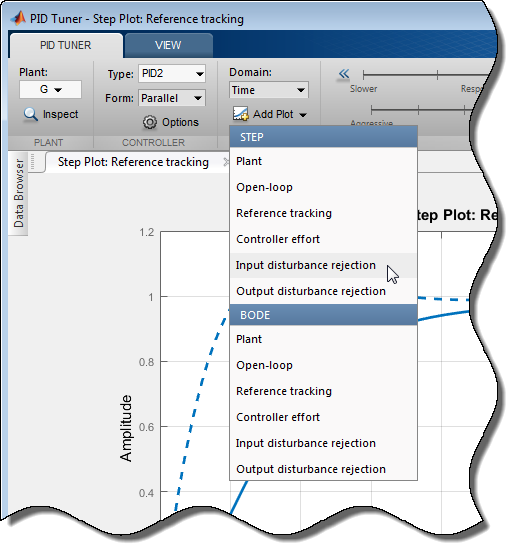
增加第二个自由度消除了参考跟踪响应中的超调。接下来,添加一个阶跃响应图来比较两个控制器的抗扰性能。选择加入波形图>输入干扰抑制。
PID调谐器将抗扰图与参考跟踪图并排放在一起。

两种控制器的抗扰性能相同。因此,使用二自由度控制器消除了参考跟踪超调,而没有任何干扰抑制的代价。
你也可以通过改变。来改善干扰抑制PID调谐器设计的焦点。首先,单击出口箭头![]() 并选择
并选择另存为基准再次设置2-DOF控制器作为基线进行比较。
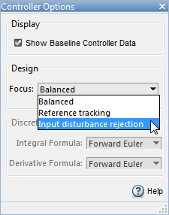
更改PID调谐器设计的重点是在不改变响应时间或瞬态特性系数的情况下,支持参考跟踪。要这样做,请单击![]() 选项,并在焦点菜单中,选择
选项,并在焦点菜单中,选择输入干扰抑制。
PID调谐器自动修正控制器系数,关注抗扰性能。
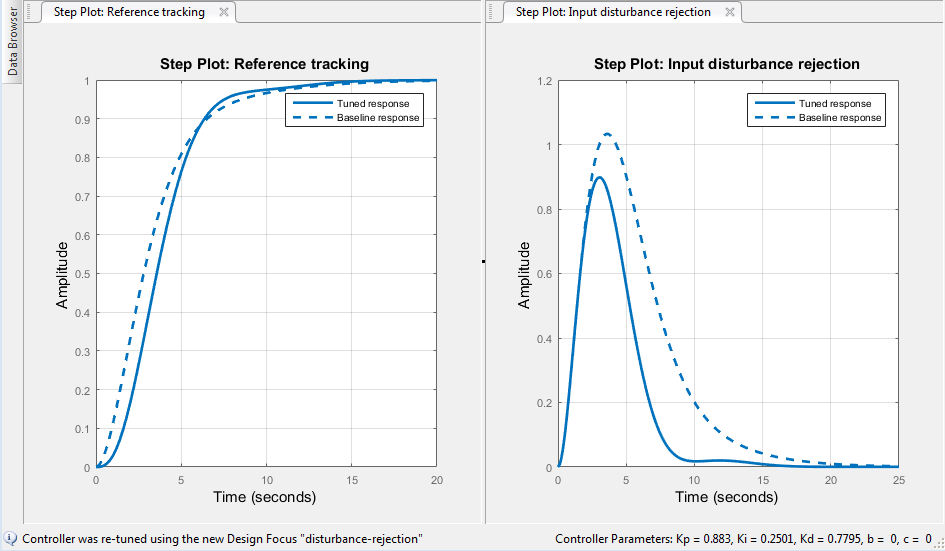
使用默认的平衡设计焦点,PID调谐器选择一个b值在0和1之间。对于这个工厂,当你改变设计重点,使之更有利于抑制干扰时,PID调谐器集b= 0和c= 0。因此,PID调谐器自动生成一个I-PD控制器来优化干扰抑制。(在不设置设计焦点的情况下显式地指定I-PD控制器会得到类似的控制器。)
响应曲线表明,随着设计重点的改变,与平衡二自由度控制器相比,干扰抑制得到了进一步的改善。这种改进伴随着一些参考跟踪性能的牺牲,后者稍微慢一些。但是,引用跟踪响应仍然没有超调。
因此,使用2-DOF控制可以改善干扰抑制,而不会牺牲尽可能多参考跟踪性能1自由度控制。对系统性能的影响,这些对工厂的性能和控制器的速度强烈地依赖。对于某些植物和一些控制带宽,使用二自由度控制或改变设计焦点对被调整结果较少或没有影响。
另请参阅
相关话题
您还可以选择从下面的列表中的网站:
