pidTuner
打开PID调谐的PID调谐器
语法
PidTuner(SYS,类型)
pidTuner (sys Cbase)
PidTuner(SYS)
pidTuner
描述
pidTuner (推出PID调谐器应用程序并设计类型的控制器sys,类型)类型适用于植物sys.
pidTuner (使用基线控制器启动PID调谐器sys,Cbase)Cbase这样您就可以在设计的控制器和基线控制器之间进行比较。如果Cbase是一个PID,PIDSTD.,pid2要么PIDSTD2控制器对象,PID调谐器设计相同形式,类型和离散集成器公式的控制器Cbase.
pidTuner (设计了一种并联型PI控制器。sys)
pidTuner启动PID调谐器,默认设备为1,比例(P)控制器为1。
输入参数
|
控制器设计的植物模型。 如果植物具有不稳定的极点,并且
然后,您必须在工厂中指定不稳定的极点的数量。要在打开PID调谐器后执行此操作植物菜单中,选择 |
|
控制器类型的控制器设计,指定为字符向量。这个词控制器类型指控制器动作中存在哪些术语。例如,PIDF控制器仅具有比例和积分的术语,而PIDF控制器包含比例,积分器和过滤的衍生术语。 1-DOF控制器
2-DOF控制器
有关一般二自由度PID控制器的更多信息,请参见二自由度PID控制器. 具有固定权重的二自由度控制器
关于固定设定值权重的2-DOF PID控制器的详细信息,请参见PID控制器类型. 控制器形式当你使用 如果
|
|
一种表示基准控制器的动态系统,允许将所设计控制器的性能与控制器的性能进行比较 如果 如果 |
例子
并行形式控制器的交互式PID调谐
启动PID调谐器,为离散时间设备设计并行形式PIDF控制器:
Gc = zpk([],[-1 -1],1);Gd =汇集(Gc, 0.1);创建离散时间植物pidTuner(Gd,'pidf') %启动PID Tuner
基于积分器离散化方法的标准控制器交互式PID整定
设计一个标准形式的PIDF控制器背向后浮雕离散集成器公式:
Gc = zpk([],[-1 -1],1);Gd =汇集(Gc, 0.1);%创建离散时间工厂%创建基线控制器。Cbase = pidstd(1、2、3、4、Ts, 0.1,……'IFormula','BackwardEuler','DFormula','BackwardEuler') pidTuner(Gd,Cbase) %启动PID Tuner
PID调谐器设计了一个控制器Gd.具有相同的形式、类型和离散积分器公式的Cbase.为便于比较,可以显示的响应图Cbase与所设计控制器的响应图,单击显示基线复选框在PID调谐器。
提示
如果
类型要么Cbase指定一个自由度(1-DOF)PID控制器,然后pidTuner设计单位反馈回路控制器如图所示:
如果
类型要么Cbase指定一个二自由度(2-DOF) PID控制器,则pidTuner设计一个2-DOF控制器,如图所示: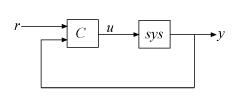
PID Tuner的默认目标相位裕度为60度,并自动调整PID增益以平衡性能(响应时间)和鲁棒性(稳定裕度)。使用响应时间要么带宽和阶段保证金滑块调整控制器的性能对您的要求。提高性能通常会降低稳健性,反之亦然。
的响应图回复菜单,分析控制器的性能。
如果您提供
Cbase, 查看显示基线显示基线控制器的响应。有关使用PID调谐器的更详细信息,请参阅使用PID调谐器设计PID控制器.


有关实时编辑器中的交互式PID调优,请参阅调整PID控制器住编辑任务。这个任务让你交互式地设计一个PID控制器并自动生成MATLAB®为您的活动脚本编写代码。
算法
有关MathWorks的信息®PID整定算法,见PID优化算法.
选择
您可以从MATLAB桌面打开PID调谐器应用程序标签。当你这样做时,使用植物菜单中指定您的工厂模型。
用于在命令行进行PID调整,使用Pidtune..这Pidtune.命令可以一次为多个工厂设计一个控制器。
有关实时编辑器中的交互式PID调优,请参阅调整PID控制器住编辑任务。这个任务让您交互式设计一个PID控制器,并自动生成MATLAB代码为您的生活脚本。
参考
Åström,K. J.和Hägglund,T.高级PID控制,研究三角公园,NC:仪器,系统和自动化协会,2006年。
另请参阅
功能
对象
住编辑任务
在R2014B中介绍
您还可以从以下列表中选择一个网站:
