visionDetectionGenerator
生成驾驶场景的视觉检测
描述
的visionDetectionGenerator系统对象™从安装在自我车辆上的单目相机传感器生成检测。所有的检测都参照自我车辆或车载传感器的坐标系。您可以使用visionDetectionGenerator对象在包含参与者和轨迹的场景中创建drivingScenario对象。使用统计模式,发生器可以模拟添加随机噪声的真实检测,也可以产生虚警检测。此外,您可以使用visionDetectionGenerator对象来创建对象的输入multiObjectTracker.方法构建场景时驾驶场景设计师App,安装在自我车上的摄像头传感器输出为visionDetectionGenerator对象。
产生视觉检测:
创建
visionDetectionGenerator对象并设置其属性。调用带有参数的对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?
创建
语法
描述
传感器= visionDetectionGenerator
传感器= visionDetectionGenerator (cameraConfig)monoCamera配置对象,cameraConfig.
属性
使用
语法
描述
lanedets=传感器(laneboundaries,时间)lanedets,从车道边界结构,laneboundaries.
启用此语法集DetectionOutput来“只道”.类指定的间隔生成车道边界LaneUpdateInterval财产。
lanedets=传感器(演员,laneboundaries,时间)lanedets,从车道边界结构,laneboundaries.
若要启用此语法,请设置DetectionOutput来“道与阻塞”.类指定的间隔生成车道边界LaneUpdateInterval财产。
[___,也返回已报告的有效检测数,numValidDets) =传感器(___)numValidDets.
[___,也返回一个逻辑值,numValidDetsisValidTime) =传感器(___)isValidTime,表示UpdateInterval生成检测的时间已经过去了。
[返回两个对象检测,依据,numValidDets,isValidTime,lanedets,numValidLaneDets,isValidLaneTime) =传感器(演员,laneboundaries,时间)依据,以及车道检测lanedets.该语法还返回报告的有效车道检测的数量,numValidLaneDets,和一面旗帜,isValidLaneTime,表示生成车道检测所需的模拟时间是否已经过。
若要启用此语法,请设置DetectionOutput来车道和对象的.
输入参数
演员- - - - - -场景演员的姿势
结构|结构数组
场景参与者姿势,指定为结构或结构数组。每个结构都对应一个参与者。方法可以生成此结构actorPoses函数。您也可以手动创建这些结构。该表显示了对象用于生成检测的字段。所有其他字段将被忽略。
| 场 | 描述 |
|---|---|
ActorID |
场景定义的参与者标识符,指定为正整数。 |
位置 |
行为人的位置,指定为形式为[的实值向量xyz].单位是米。 |
速度 |
速度(v)的演员x-y- - - - - -,z-directions,指定为形式为[的实值向量vxvyvz].单位是米每秒。 |
卷 |
actor的滚动角度,指定为实值标量。单位以度为单位。 |
球场 |
actor的俯仰角,指定为实值标量。单位以度为单位。 |
偏航 |
actor的偏航角,指定为实值标量。单位以度为单位。 |
AngularVelocity |
角速度(ω)的演员x-,y- - - - - -,z-directions,指定为形式为[的实值向量ωxωyωz].单位是以度/秒为单位。 |
依赖关系
要启用此参数,请设置DetectorOutput财产“只将对象”,“道与阻塞”,或车道和对象的.
laneboundaries- - - - - -车道边界
车道边界结构阵列
车道边界,指定为车道边界结构的数组。下表显示了每个结构的字段。
| 场 | 描述 |
|
车道边界坐标,指定为实值N3矩阵,N为车道边界坐标的个数。车道边界坐标定义了沿道路中心,在距离自我车辆指定纵向距离的边界上的点的位置。
这个矩阵还包括与自我载具零距离处的边界坐标。这些坐标位于自我车辆原点的左右,原点位于后桥中心下方。单位是米。 |
|
车道边界的每一行都有曲率坐标矩阵,指定为实值N1的向量。N为车道边界坐标的个数。单位是弧度每米。 |
|
每一行的车道边界曲率的导数坐标矩阵,指定为实值N1的向量。N为车道边界坐标的个数。单位是弧度每平方米。 |
|
初始车道边界航向角,指定为实标量。车道边界的朝向角度与自我车辆的朝向是相对的。单位以度为单位。 |
|
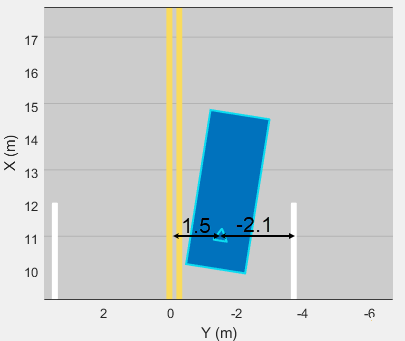
自我车辆位置从车道边界的横向偏移量,指定为实标量。对自我车辆左侧车道边界的偏移量为正。自我载体右侧的偏移量是负的。单位是米。在这幅图中,自我车辆距离左车道1.5米,距离右车道2.1米。
|
|
车道界线标记的类型,指定为以下值之一:
|
|
车道边界标记的饱和强度,指定为从0到1的实标量。的值 |
|
车道边界宽度,指定为正实标量。在双线车道标志中,两条线和线与线之间的间距使用相同的宽度。单位是米。 |
|
虚线中的虚线长度,指定为正实标量。在双线车道标志中,两条线的长度相同。 |
|
虚线中虚线之间的空格长度,指定为正实标量。在虚线双线车道标记中,两条线使用相同的空间。 |
依赖关系
要启用此参数,请设置DetectorOutput财产“只道”,“道与阻塞”,或车道和对象的.
数据类型:结构体
时间- - - - - -当前仿真时间
积极的真正的标量
当前模拟时间,指定为正实标量。的drivingScenario对象以固定的时间间隔调用视觉检测生成器。方法定义的间隔内视觉检测器生成新的检测UpdateInterval财产。的值UpdateInterval而且LanesUpdateInterval属性必须是模拟时间间隔的整数倍。更新间隔之间从传感器请求的更新不包含检测。单位以秒为单位。
例子:10.5
数据类型:双
输出参数
对象的功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,释放名为obj,使用以下语法:
发行版(obj)
例子
生成多个车辆的视觉检测
使用安装在自我车辆上的前向汽车视觉传感器生成检测。假设有两个目标车辆:
载体1在自我载体的正前方,以相同的速度移动。
车辆2在左车道上比自我车辆快12公里每小时。
所有的位置,速度和测量都是相对于自我载体而言的。运行模拟10步。
dt = 0.1;car1 =结构(“ActorID”, 1“位置”(100 0 0),“速度”, [5*1000/3600 00]);car2 =结构(“ActorID”2,“位置”(150 10 0),“速度”(12 * 1000/3600 0 0]);
创建一个与自我车辆位置偏移的汽车视觉传感器。默认情况下,传感器位置在距车辆中心(3.4,0)米,距地平面1.1米处。
传感器= visionDetectionGenerator (“DetectionProbability”, 1...“MinObjectImageSize”, 5 [5],“MaxRange”, 200,“DetectionCoordinates”,传感器笛卡儿的);追踪= multiObjectTracker (“FilterInitializationFcn”@initcvkf,...“ConfirmationParameters”(3 - 4),“NumCoastingUpdates”6);
在非自我的角色移动时为其生成视觉检测。输出检测形成单元阵列。只从要传递给的检测中提取位置信息multiObjectTracker,它只需要职位信息。然后为每一组新的检测更新跟踪器。
simTime = 0;nsteps = 10;为k = 1:nsteps dets = sensor([car1 car2],simTime);n =大小(侦破,1);为k = 1:n meas = dets{k}.测量(1:3);依据k{}。测量=量;measmtx =侦破{k} .MeasurementNoise (1:3, 1:3);依据k{}。MeasurementNoise = measmtx;结束[confirmedTracks, tentativeTracks allTracks] = updateTracks(记录、侦破、simTime);simTime = simTime + dt;car1。位置= car1。位置+ dt*car1.Velocity; car2.Position = car2.Position + dt*car2.Velocity;结束
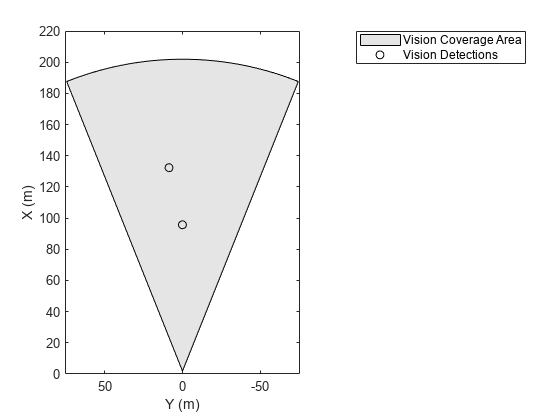
使用birdsEyePlot来创建检测的俯瞰视图。绘制传感器覆盖区域。提取x而且y目标位置的转换测量将单元格的字段转换为MATLAB®数组。然后,绘制检测使用birdsEyePlot功能。
BEplot = birdsEyePlot (“XLim”220年[0],“YLim”75年[-75]);caPlotter = coverageAreaPlotter (BEplot,“DisplayName的”,“视觉覆盖范围”);plotCoverageArea (caPlotter sensor.SensorLocation sensor.MaxRange,...sensor.Yaw,sensor.FieldOfView(1)) detPlotter = detectionPlotter(BEplot,“DisplayName的”,视觉检测的);detPos = cellfun (@ (d) d.Measurement(1:2),精细,“UniformOutput”、假);detPos = cell2mat (detPos ') ';如果~ isempty (detPos) plotDetection (detPlotter detPos)结束
从单目相机生成视觉检测
通过使用单目相机配置创建视觉传感器,并从该传感器生成检测。
指定相机的内在参数并创建一个monoCamera对象。摄像机被安装在离地面1.5米高、与地面有1度倾斜度的自我车辆的顶部。
focalLength = [800 800];principalPoint = [320 240];imageSize = [480 640];intrinsic = cameraIntrinsics (focalLength principalPoint图象尺寸);身高= 1.5;距= 1;monoCamConfig = monoCamera (intrinsic、身高、“节”、沥青);
使用单目摄像机配置创建视觉检测生成器。
visionSensor = visionDetectionGenerator (monoCamConfig);
生成一个带有一辆自我车辆和两辆目标车辆的驾驶场景。把第一辆目标车放在自我车前方30米的地方。将第二辆目标车放置在自我车前方20米的位置,但向左偏移3米。
场景= drivingScenario;egoVehicle =车辆(场景中,“ClassID”1);targetCar1 =车辆(场景中,“ClassID”, 1“位置”, 30 0 0);targetCar2 =车辆(场景中,“ClassID”, 1“位置”[20 3 0]);
使用鸟瞰图来显示车辆轮廓和传感器覆盖区域。
图bep = birdsEyePlot(“XLim”, 50 [0],“YLim”20 [-20]);olPlotter = outlinePlotter (cep);(位置、偏航、长度、宽度、originOffset color] = targetOutlines (egoVehicle);plotOutline (olPlotter、位置、偏航、长度、宽度);caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,“FaceColor”,“蓝”);plotCoverageArea (caPlotter visionSensor.SensorLocation visionSensor.MaxRange,...visionSensor.Yaw visionSensor.FieldOfView (1))

从自我车辆的角度获得目标车辆的姿态。使用这些姿势从传感器生成检测。
提出了= targetPoses (egoVehicle);[侦破,numValidDets] = visionSensor(姿势,scenario.SimulationTime);
显示(X,Y)有效检测的位置。对于每次检测,(X,Y的前两个值测量字段。
为i = 1:numValidDets XY = dets{i}.Measurement(1:2);detXY = sprintf ('检测%d: X = %。2f米,Y = %。2 f米”,我,XY);disp (detXY)结束
探测1:X = 19.09米,Y = 2.79米探测2:X = 27.81米,Y = 0.08米
生成对象和车道边界检测
创建一个驾驶场景,包括一辆自我车辆和一辆目标车辆沿着一条三车道的道路行驶。使用视觉检测发生器检测车道边界。
场景= drivingScenario;
使用车道规格创建三车道道路。
roadCenters = [0 0 0;60 0 0;120年30 0];lspc = lanespec (3);路(场景、roadCenters“道”, lspc);
指定自我车辆以30米/秒的速度跟随中心车道。
egovehicle =车辆(场景中,“ClassID”1);Egopath = [1.5 0 0;60 0 0;111年25 0];egospeed = 30;smoothTrajectory (egovehicle egopath egospeed);
指定目标车辆以40米/秒的速度行驶在自我车辆的前面,并在靠近自我车辆的地方换道。
targetcar =车辆(场景中,“ClassID”1);Targetpath = [8 2;60 -3.2;120年33];targetspeed = 40;定位路径,smoothTrajectory (targetcar targetspeed);
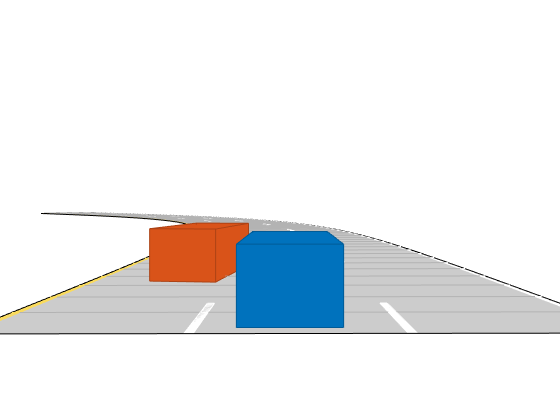
显示一个追逐情节从自我车辆背后的3d视图的场景。
chasePlot (egovehicle)
创建一个检测车道和物体的视觉检测生成器。传感器的俯仰指向向下一度。
visionSensor = visionDetectionGenerator (“节”, 1.0);visionSensor。DetectorOutput =车道和对象的;visionSensor。ActorProfiles= actorProfiles(scenario);
运行仿真。
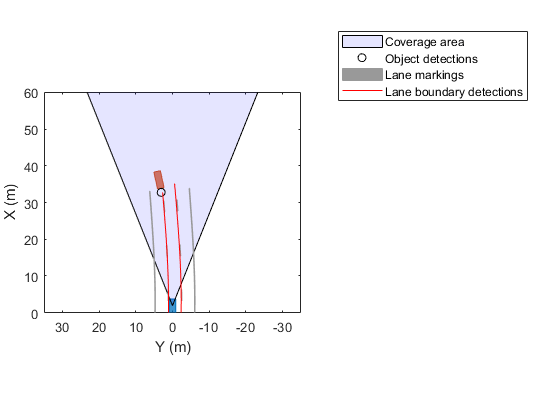
创建一个鸟瞰图和相关的绘图仪。
显示传感器覆盖区域。
显示车道标记。
获得道路上目标的地面真实姿态。
在前方60米内取得理想的行车界线点。
从理想的目标姿态和车道边界生成检测。
显示目标的轮廓。
当对象检测有效时显示对象检测。
车道检测有效时显示车道边界。
cep = birdsEyePlot (“XLim”, 60 [0],“YLim”35 [-35]);caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,...“FaceColor”,“蓝”);detPlotter = detectionPlotter (cep),“DisplayName的”,“对象检测”);lmPlotter = laneMarkingPlotter (cep),“DisplayName的”,“车道标记”);lbPlotter = laneBoundaryPlotter (cep),“DisplayName的”,...“车道边界检测”,“颜色”,“红色”);olPlotter = outlinePlotter (cep);plotCoverageArea (caPlotter visionSensor。SensorLocation,...visionSensor.MaxRange visionSensor.Yaw,...visionSensor.FieldOfView (1));而advance(scenario) [lmv,lmf] = laneMarkingVertices(egovehicle);plotLaneMarking(lmPlotter,lmv,lmf) tgtpose = targetpose (egovehicle);lookaheadDistance = 0:0.5:60;磅= laneBoundaries (egovehicle,“XDistance”lookaheadDistance,“LocationType”,“内心”);[obdets, nobdets obValid、lb_dets nlb_dets, lbValid] =...visionSensor (tgtpose磅,scenario.SimulationTime);[objposition, objyaw objlength、objwidth objoriginOffset, color] = targetOutlines (egovehicle);plotOutline (olPlotter、objposition objyaw、objlength objwidth,...“OriginOffset”objoriginOffset,“颜色”、颜色)如果= cellfun(@(d)d. measurement (1:2),obdets,“UniformOutput”、假);detPos = vertcat (0 (0, 2), cell2mat (detPos ') ');plotDetection (detPlotter detPos)结束如果lbValid plotLaneBoundary (lbPlotter vertcat (lb_dets.LaneBoundaries))结束结束

配置理想的视觉传感器
从理想的视觉传感器生成检测,并将这些检测与来自噪声传感器的检测进行比较。一个理想的传感器它总是能产生检测,没有假阳性,也没有附加的随机噪声。
创建一个驾驶场景
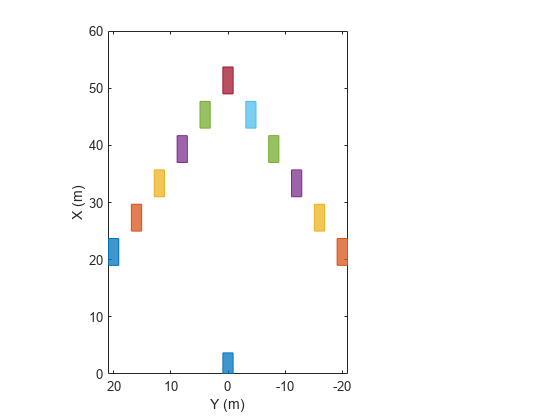
创建一个驾驶场景,在这个场景中,自我车辆被放置在一排目标汽车的对角线前面。有了这个配置,您可以稍后绘制被检测目标的测量噪声协方差,而不必让目标车辆彼此遮挡。
场景= drivingScenario;egoVehicle =车辆(场景中,“ClassID”1);numTgts = 6;x = linspace(20、50、numTgts)”;y = linspace (-20 0, numTgts) ';x = [x, x (1: end-1)];y = [y; - y (1: end-1)];numTgts =元素个数(x);为m = 1:numTgts vehicle(scenario,“ClassID”, 1“位置”, (x (m) y (m) 0]);结束
在鸟瞰图中绘制驾驶场景。
cep = birdsEyePlot (“XLim”, 60 [0]);传奇(“隐藏”) olPlotter = outlinePlotter(bep);(位置、偏航、长度、宽度、originOffset color] = targetOutlines (egoVehicle);plotOutline (olPlotter、位置、偏航、长度、宽度、...“OriginOffset”originOffset,“颜色”、颜色)
创建一个理想的视觉传感器
方法创建视觉传感器visionDetectionGenerator系统对象™。要生成理想的检测,设置DetectionProbability来1,FalsePositivesPerImage来0,HasNoise来假.
DetectionProbability = 1-只要目标不被遮挡,并且满足范围、速度和图像大小的限制,传感器总是对目标产生检测。FalsePositivesPerImage = 0—传感器只对驾驶场景中的真实目标进行检测。HasNoise = false-传感器不添加随机噪声报告的位置和速度的目标。然而,objectDetection传感器返回的对象将测量噪声值设置为如果添加的噪声方差HasNoise是真正的.有了这些噪声值,就可以使用multiObjectTracker.这种技术对分析机动滞后很有用,不需要运行耗时的蒙特卡罗模拟。
idealSensor = visionDetectionGenerator (...“SensorIndex”, 1...“UpdateInterval”,场景。SampleTime,...“SensorLocation”(0.75 * egoVehicle。轴距0),...“高度”, 1.1,...“节”0,...“intrinsic”cameraIntrinsics(800, 240年[320],[480]640),...“BoundingBoxAccuracy”, 50岁,...为了便于说明,将噪声调大。“ProcessNoiseIntensity”5,...“MaxRange”现年60岁的...“DetectionProbability”, 1...“FalsePositivesPerImage”0,...“HasNoise”假的,...“ActorProfiles”actorProfiles(场景))
idealSensor = visionDetectionGenerator with properties: SensorIndex: 1 UpdateInterval: 0.0100 SensorLocation:[2.1000 0]高度:1.1000偏摆:0俯仰:0滚动:0 innerics: [1x1 cameraIntrinsics] DetectorOutput: 'Objects only' FieldOfView: [43.6028 33.3985] MaxRange: 60 MaxSpeed: 100 MaxAllowedOcclusion: 0.5000 MinObjectImageSize: [15 15] DetectionProbability: 1 FalsePositivesPerImage: 0显示所有属性
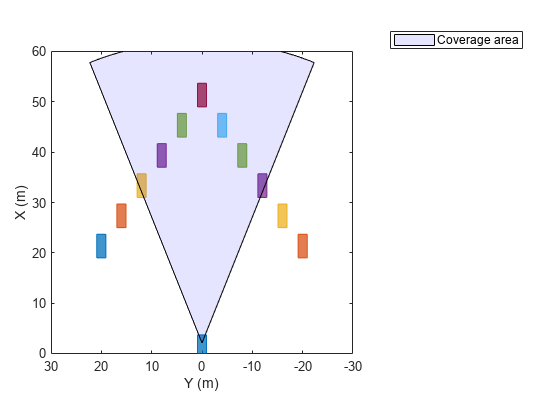
绘制理想视觉传感器的覆盖区域。
传奇(“显示”) caPlotter = coverageAreaPlotter(cep,“DisplayName的”,“覆盖范围”,“FaceColor”,“蓝”);mountPosition = idealSensor.SensorLocation;范围= idealSensor.MaxRange;取向= idealSensor.Yaw;fieldOfView = idealSensor.FieldOfView (1);plotCoverageArea (caPlotter mountPosition、范围、定位、fieldOfView);
模拟理想的视觉检测
获取目标的位置。位置在自我交通工具的坐标里。
gTruth = targetPoses (egoVehicle);
生成时间戳视觉检测。的单元格数组返回这些检测objectDetection对象。
时间= scenario.SimulationTime;依据= idealSensor (gTruth、时间);
检查第一(最左)检测的测量值和测量噪声方差。即使检测是理想的,因此没有增加随机噪声MeasurementNoise属性显示值,就像检测确实有噪声一样。
依据{1}。测量
ans =6×131.0000 -11.2237 0000
依据{1}。MeasurementNoise
ans =6×61.5427 -0.5958 0000 -0.5958 0.2422 0000 00 100.0000 0000 00 0.5398 -0.1675 0000 -0.1675 0.1741 0000 000 100.0000
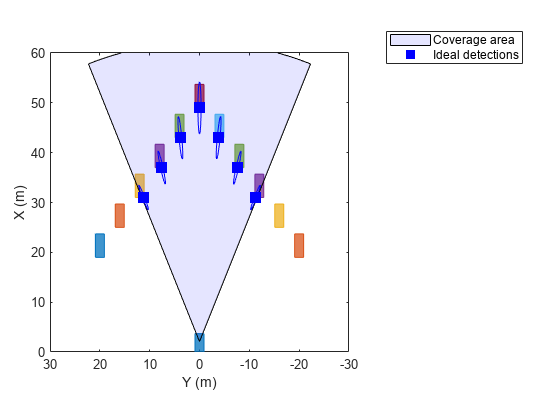
绘制测量噪声协方差的2西格玛等高线的理想检测和椭圆。
pos = cell2mat (cellfun (@ (d) d.Measurement(1:2)相同,...“UniformOutput”、假));x =重塑(cell2mat (cellfun (@ (d) d.MeasurementNoise(1:2, 1:2),精细,...“UniformOutput”假)”,2,2,[]);绘图机= trackPlotter (cep,“DisplayName的”,“理想的检测”,...“MarkerEdgeColor”,“蓝”,“MarkerFaceColor”,“蓝”);σ= 2;plotTrack(绘图仪、pos、σ^ 2 *浸)
模拟噪声检测进行比较
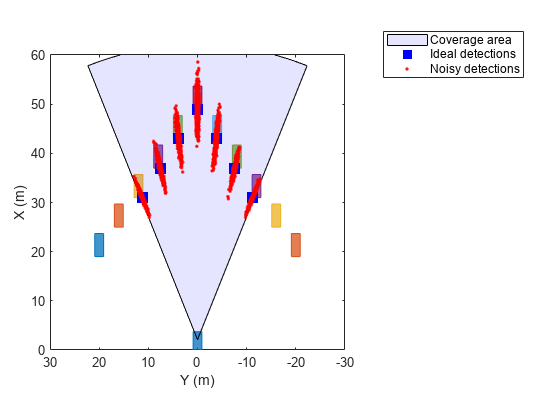
基于理想传感器的特性创建一个噪声传感器。
noisySensor =克隆(idealSensor);(noisySensor) noisySensor发布。HasNoise = true;
将驾驶场景重置到原始状态。
重启(场景)
从噪声检测中收集统计信息。
numMonte = 1 e3;pos = [];为itr = 1:numMonte time = scenario.SimulationTime;依据= noisySensor (gTruth、时间);%保存噪声测量pos = [pos; cell2mat (cellfun (@ (d) d.Measurement(1:2)相同,“UniformOutput”、假));推进(场景);结束
绘制噪声检测图。
绘图机= detectionPlotter (cep,“DisplayName的”,噪声检测的,...“标记”,“。”,“MarkerEdgeColor”,“红色”,“MarkerFaceColor”,“红色”);plotDetection(绘图仪、pos)
算法
视觉传感器模拟一个单眼相机,产生二维相机图像。为了将这些2-D图像的坐标投影到用于驾驶场景的3-D世界坐标中,传感器算法假设z-目标图像边界框底边缘所有图像点的位置(高度)在地面上。定义地面的平面是由视觉检测发生器的高度属性定义的,它定义了单目相机在地平面以上的偏移量。通过这种投影,生成的图像中物体的垂直位置与它们在道路上方的高度密切相关。然而,如果道路不平坦,物体的高度与传感器的高度不一致,那么传感器报告的检测不准确。有关显示此行为的示例,请参见模型视觉传感器检测.
扩展功能
版本历史
您也可以从以下列表中选择网站: