Programmatic Scenario Authoring
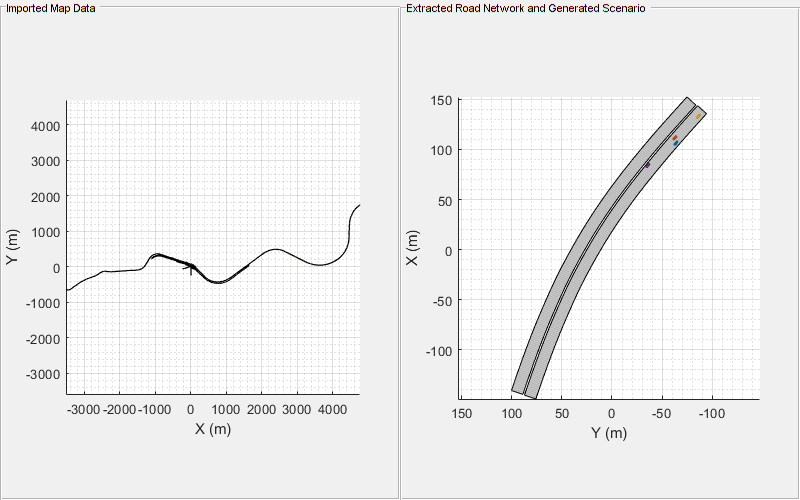
drivingScenarioobjectThedrivingScenarioobject enables you to author driving scenarios from the MATLAB®command line. Use this object to design complex road networks or parking lots and specify actors and their trajectories. You can then generate synthetic data from these scenarios by using sensor models and visualize this data on a bird's-eye plot.
The flexible interface of thedrivingScenarioobject enables you to create variations of a scenario for rapidly testing driving algorithms under various conditions. For more details, seeCreate Driving Scenario Variations Programmatically.
Functions
Topics
Driving Scenarios
Create Driving Scenario Programmatically
Programmatically create ground truth driving scenarios for synthetic sensor data and tracking algorithms.
Define Road Layouts Programmatically
Programmatically create road junctions and combine these junctions to create more complicated road networks.
Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario.
Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario.
Create Driving Scenario Variations Programmatically
Programmatically create variations of a driving scenario that was built using the驾驶场景设计师应用程序。
Visualize Sensor Coverage, Detections, and Tracks
Configure and use a bird's-eye plot to display sensor coverage, detections, and tracking results around the ego vehicle.
Model a highway scenario with intelligent vehicles that are controlled by decision logic defined by a Stateflow®chart.
Sensors
模型并模拟各种驾驶场景的汽车雷达传感器的输出。
Radar Signal Simulation and Processing for Automated Driving
Model the hardware, signal processing, and propagation environment of a radar for a driving scenario.
Simulate Radar Ghosts Due to Multipath Return
在返回雷达之前将信号能量反映出另一个目标时,生成发生的重影目标。
Model and simulate the output of an automotive vision sensor for various driving scenarios.
Simulate Inertial Sensor Readings from a Driving Scenario(Navigation Toolbox)
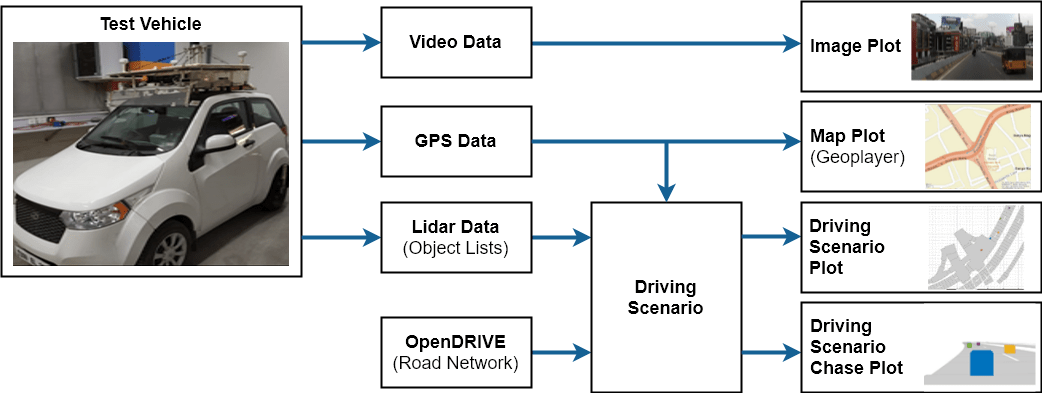
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
Featured Examples



Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América拉丁(Español)
- Canada(English)
- United States(English)
欧洲
- Belgium(English)
- 丹麦(English)
- Deutschland(德意志)
- España(Español)
- Finland(English)
- 法国(Français)
- 爱尔兰(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- 挪威(English)
- Österreich(德意志)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
