fsolve
解非线性方程组
语法
描述
例子
二维非线性系统的解
这个例子展示了如何在两个变量中求解两个非线性方程。方程是

把方程转换成这个形式 .
.

写一个函数来计算这两个方程的左边。
函数F = root2d F (x) (1) = exp (exp (- x (x (1) + (2)))) - x (2) * (1 + x (1) ^ 2);F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
将此代码保存为一个名为root2d.m在MATLAB®路径上。
从这个点开始解方程组(0,0).
Fun = @root2d;X0 = [0,0];X = fsolve(fun,x0)
方程解决。Fsolve是完成的,因为函数值的向量通过函数公差的值测量接近于零,并且通过梯度测量问题显得有规律。X = 0.3532 0.6061
使用非默认选项的解决方案
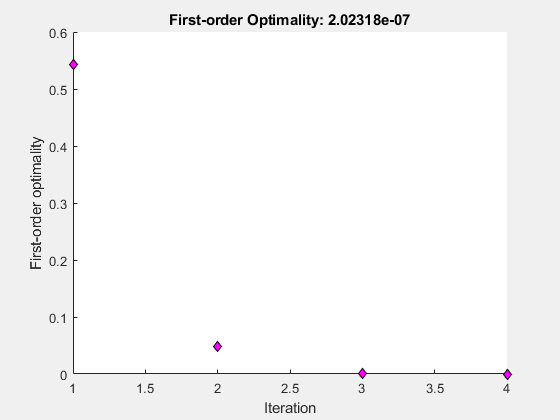
检验一个非线性系统的解的过程。
将选项设置为不显示,并设置一个显示一阶最优性的绘图函数,该函数应在算法迭代时收敛于0。
选项= optimoptions(“fsolve”,“显示”,“没有”,“PlotFcn”, @optimplotfirstorderopt);
非线性系统中的方程为

把方程转换成这个形式 .
.

写一个函数来计算这两个方程的左边。
函数F = root2d F (x) (1) = exp (exp (- x (x (1) + (2)))) - x (2) * (1 + x (1) ^ 2);F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
将此代码保存为一个名为root2d.m在MATLAB®路径上。
从这一点出发求解非线性系统(0,0)观察解的过程。
Fun = @root2d;X0 = [0,0];X = fsolve(fun,x0,options)
X = 0.3532 0.6061
解决问题结构
创建一个问题结构fsolve解决问题。
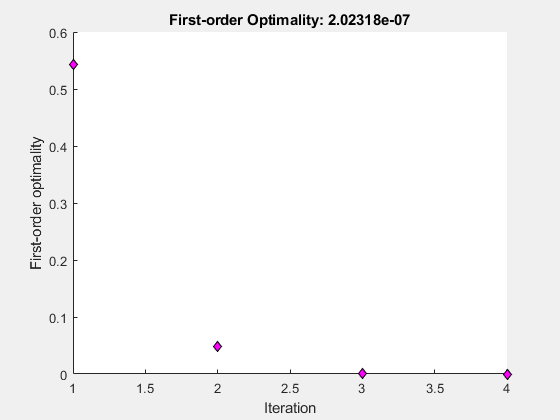
解决同样的问题使用非默认选项的解决方案,而是用问题结构来表述问题。
将问题的选项设置为不显示,并设置一个显示一阶最优性的绘图函数,该函数应在算法迭代时收敛于0。
问题。选项=optimoptions(“fsolve”,“显示”,“没有”,“PlotFcn”, @optimplotfirstorderopt);
非线性系统中的方程为

把方程转换成这个形式 .
.

写一个函数来计算这两个方程的左边。
函数F = root2d F (x) (1) = exp (exp (- x (x (1) + (2)))) - x (2) * (1 + x (1) ^ 2);F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
将此代码保存为一个名为root2d.m在MATLAB®路径上。
在问题结构中创建其余字段。
问题。目标= @root2d;问题。x0=(0,0);问题。解算器=“fsolve”;
解决问题。
X = fsolve(问题)
X = 0.3532 0.6061
非线性系统的求解过程
此示例返回迭代显示,显示了两个方程和两个未知数组成的系统的求解过程
把方程式改写成这个形式 :
开始寻找解决方案X0 = [-5 -5].
首先,编写一个计算函数F时,方程的值x.
F = @(x) [2*x(1) -x(2) - exp(-x(1));-x(1) + 2*x(2) - exp(-x(2))];
创建初始点x0.
X0 = [-5;-5];
设置选项以返回迭代显示。
选项= optimoptions(“fsolve”,“显示”,“通路”);
解方程。
[x,fval] = fsolve(F,x0,options)
一阶信赖域迭代函数函数数f(x)步进最优半径03 47071.2 2.29e+04 11 6 12003.4 1 5.75e+03 12 9 3147.02 1 1.47e+03 13 12 854.452 1 388 14 15 239.527 1 107 15 18 67.0412 1 30.8 16 21 16.7042 1 9.05 1 7 24 2.42788 1 2.26 18 27 0.032658 0.759511 0.206 2.5 9 30 7.03149e-06 0.111927 0.00294 2.5 10 33 3.29525e-13 0.00169132 6.36e-07 2.5方程求解。Fsolve是完成的,因为函数值的向量通过函数公差的值测量接近于零,并且通过梯度测量问题显得有规律。
x =2×10.5671 - 0.5671
fval =2×1106× -0.4059 -0.4059
迭代显示显示f (x),是函数的模的平方F (x).随着迭代的进行,这个值减小到接近零。随着迭代的进行,一阶最优性度量同样减少到接近零。这些条目显示了迭代到解决方案的收敛。有关其他条目的含义,请参见迭代显示.
的fval输出给出函数值F (x),在解(到FunctionTolerance公差)。
检验矩阵方程解
找到一个矩阵 满足
,
从这一点开始X0 = [1,1;1,1].创建一个匿名函数来计算矩阵方程并创建点x0.
Fun = @(x)x*x*x - [1,2;3,4];X0 = ones(2);
将选项设置为不显示。
选项= optimoptions(“fsolve”,“显示”,“关闭”);
检查fsolve输出以了解解决方案的质量和过程。
[x,fval,exitflag,output] = fsolve(fun,x0,options)
x =2×2-0.1291 0.8602 1.2903 1.1612
fval =2×2109× -0.1618 0.0778 0.1160 -0.0474
Exitflag = 1
输出=带字段的结构:迭代:6 funcCount: 35算法:'trust-region-dogleg' firstorderopt: 2.4095e-10 message: '…'
退出标志值为1表示解决方案可靠。要手动验证这一点,请计算残差(fval的平方和),看看它有多接近零。
sum (sum (fval。* fval))
Ans = 4.7957e-20
这个小残差证实了这一点x是一个解。
你可以看到输出结构有多少迭代和函数计算fsolve执行以找到解决方案。
输入参数
输出参数
限制
要解的函数必须是连续的。
一旦成功,
fsolve只给出一个根。默认的信赖域狗腿方法只能在方程组是平方的情况下使用,即方程的数量等于未知量的数量。对于Levenberg-Marquardt方法,方程组不一定是平方的。
提示
对于较大的问题,即具有数千个或更多变量的问题,可以通过设置
算法选项“信赖域”和SubproblemAlgorithm选项“重心”.
算法
Levenberg-Marquardt方法和信赖域方法是基于非线性最小二乘算法lsqnonlin.如果系统可能没有零,请使用其中一种方法。该算法仍然返回一个残差很小的点。然而,如果系统的雅可比矩阵是奇异的,算法可能会收敛到一个点,这个点不是方程组的解(参见限制).
默认情况下
fsolve选择信赖域狗腿算法。该算法是中描述的Powell狗腿方法的一个变体[8].中实现的算法在本质上与[7].看到Trust-Region-Dogleg算法.信域算法是一种子空间信域方法,基于中所述的内反射牛顿方法[1]而且[2].每次迭代都涉及使用预处理共轭梯度(PCG)方法求解大型线性系统的近似解。看到信赖域算法.
Levenberg-Marquardt方法在参考文献中有描述[4],[5],[6].看到Levenberg-Marquardt方法.
选择功能
应用程序
的优化活动编辑器任务提供了一个可视化界面fsolve.
参考文献
[1] Coleman, T.F.和Y. Li,“约束非线性最小化的内部信赖域方法”,SIAM优化期刊,第6卷,第418-445页,1996年。
[2] Coleman, T.F.和Y. Li,“关于大规模非线性最小化的反射牛顿方法的收敛性,”数学规划,第67卷,第2期,第189-224页,1994年。
[3] Dennis, J. E. Jr.,《非线性最小二乘》数值分析的最新进展, D.雅各布斯编,学术出版社,269-312页。
[4] Levenberg, K.,“在最小二乘中解决某些问题的方法”应用数学季刊2,第164-168页,1944。
[5] Marquardt, D.,“非线性参数的最小二乘估计算法”,应用数学杂志,卷11,第431-441页,1963年。
[6] Moré, J. J.,“Levenberg-Marquardt算法:实现与理论”,数值分析华森主编,《数学讲稿》630,施普林格Verlag出版社,第105-116页,1977。
[7] Moré, J. J. B. S. Garbow和K. E. Hillstrom,MINPACK用户指南阿贡国家实验室,报告。退火- 80 - 74,1980。
[8] Powell, m.j.d.,“求解非线性代数方程组的Fortran子程序”,非线性代数方程的数值方法, P. Rabinowitz主编,Ch.7, 1970。
扩展功能
另请参阅
您也可以从以下列表中选择一个网站: