相机校准和3 d愿景
估计相机内在,失真系数,照相机外部参数,从提取物2-d的图像3-d的信息,执行鱼眼校准,立体声整流,深度估计,3- d重建,三角测量和结构从运动
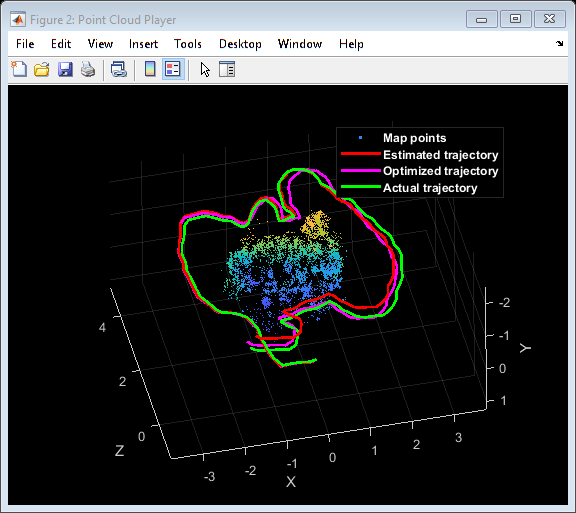
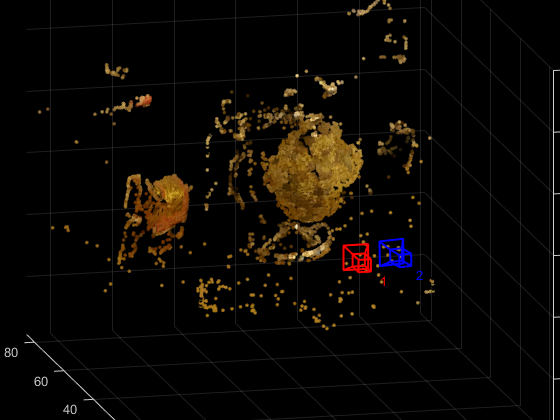
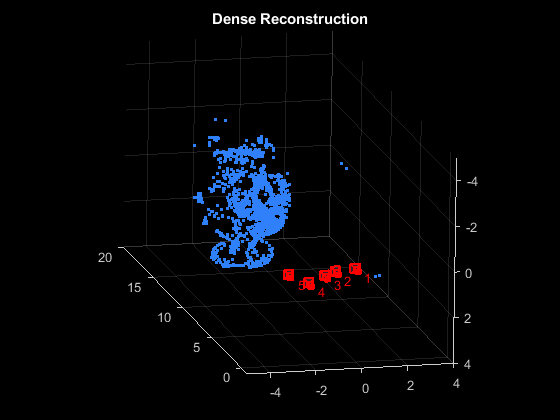
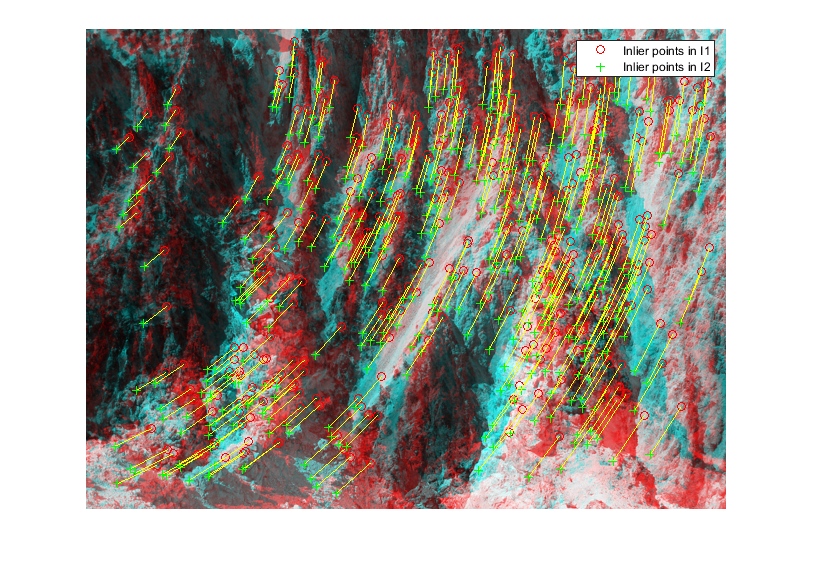
摄像机标定估计是使用一种特殊的校正图案的图像中的照相机的参数的过程。这些参数包括相机内在,失真系数,照相机外部参数。3-d的目标是从两个或多个视图的场景重构3-d场景的过程。利用计算机视觉工具箱™,您可以执行使用校准的对立体相机密3 d重建。您也可以使用未校准的立体声双摄像头,最高未知规模重建现场。最后,可以计算来自多个图像的稀疏3-d重建,使用单个校准照相机。
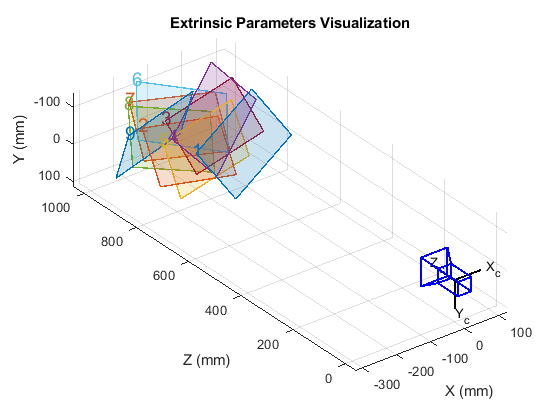
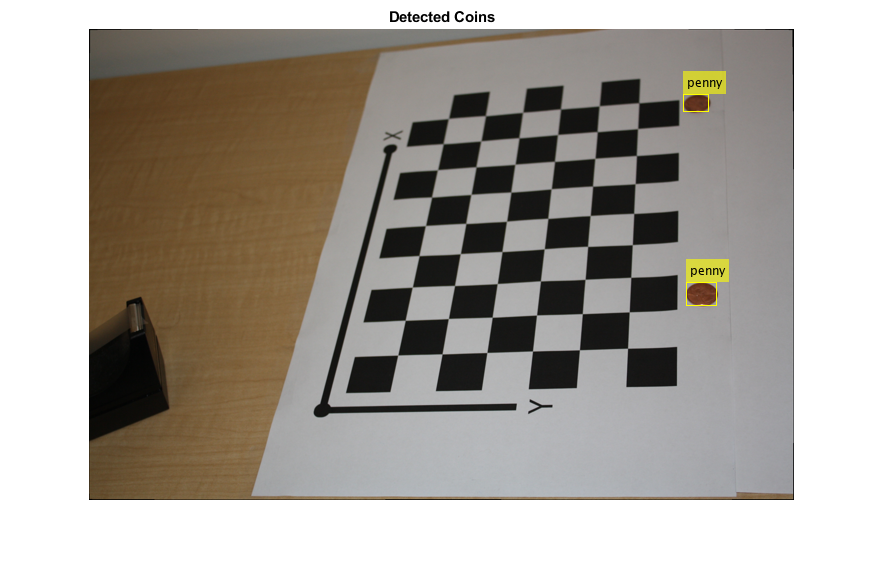
使用相机校准应用来估计照相机内在,外部参数,和透镜畸变的参数。使用这些摄像机参数,以从图像中,测量平面物体,重构来自多个摄像机3-d场景除去透镜失真效应,并执行其他计算机视觉应用。
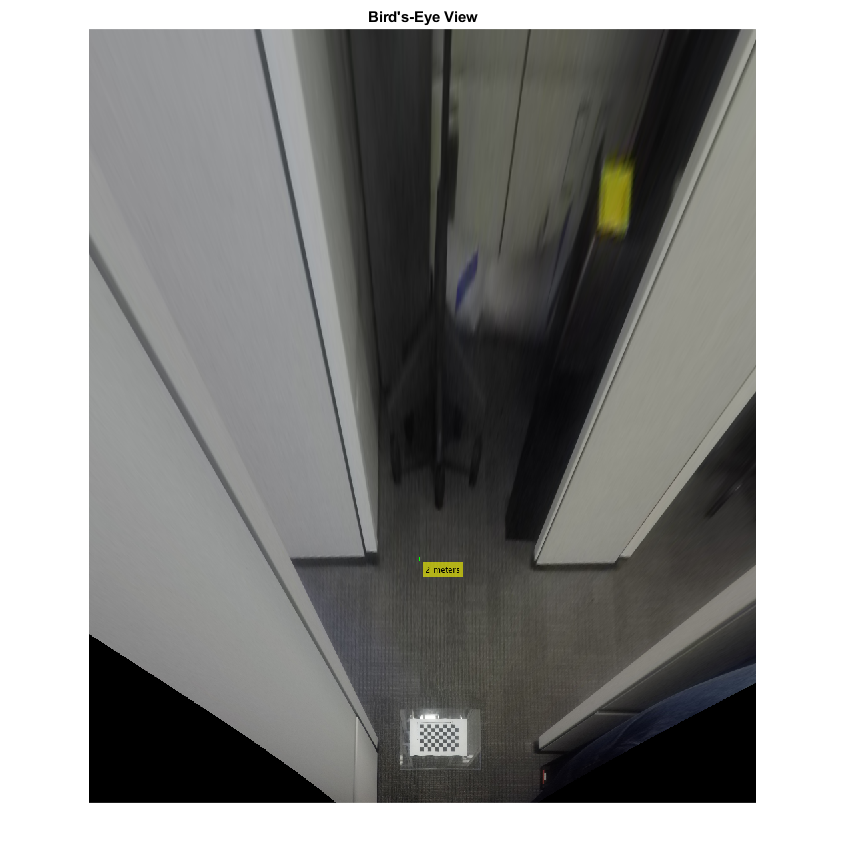
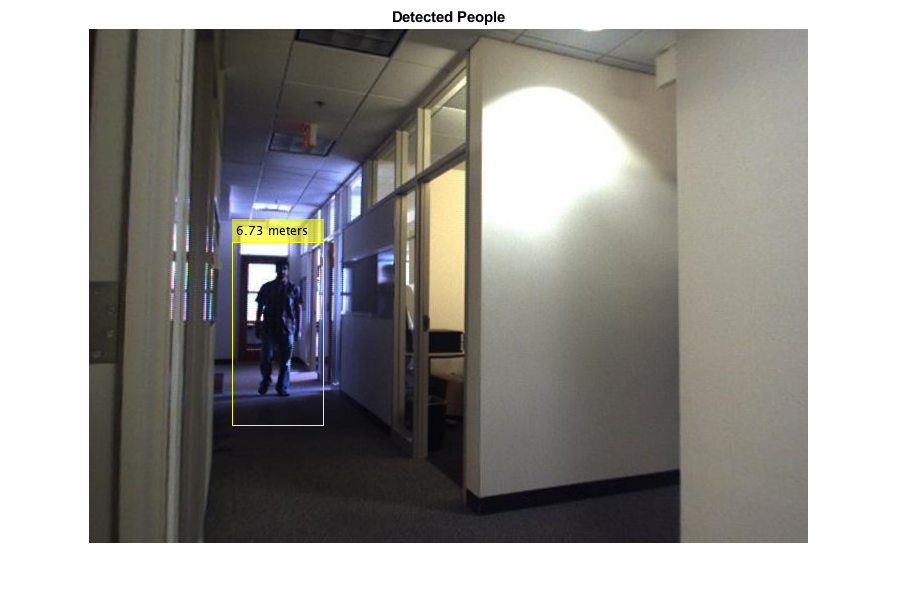
使用立体相机校准应用校准立体相机。然后,您可以用相机从图像恢复的深度。该应用程序估计每两个摄像头的参数。它还计算相对于相机1的相机2的位置和方向。
精选示例
您还可以选择从下面的列表中的网站:
