文件交换
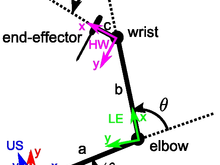
运动学工具箱面向原型机器人和计算机视觉相关任务
四元类、向量化、交替表示法转换、数值欧拉传播
万博1manbetx四维卫星姿态动态控制模拟链路模型
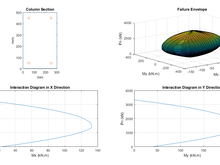
绘图故障信封和交互图x和y方向加固混凝土列
函数转换四类数据:DCM、EulerAngles、Quarternions和EulerParam
工具箱为创建和操纵双四元提供实用函数
包中包含建设移动机器人必备文件 机器人可沿路通道行
函数计算平均值四元
3D空间坐标变换
易用函数集四元演算实例和演示
生成轨迹从点到点与最小二分
计算Hohmann传输轨迹
二函数生成平滑轨迹并带边界条件
欧拉角可视化并连接轴形旋转
向量四元函数
三维硬变换和机器人四元和双四元接口
工具箱提供双四元方法,侧重于点线三维运动学
区块库操作四元
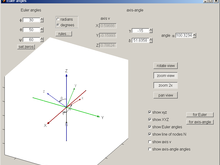
GUI显示三维旋转的不同表示
代码记录介质拖动并显示有效载荷轨迹
交互演示学习并视觉化3D坐标变换和欧拉角
单机或多单元车(或拖拉机/卡车-拖车)
硬体机器人库
基本指南针轨迹模型模拟计算机托盘控制参考轨迹
3x3旋转矩阵从欧拉角分解或3x3旋转矩阵分解至欧拉角
图形显示欧拉和固定角
计算由8坐标给定的六边形体积
图像数据转换为四元矩阵
机器人摇篮模拟
量变矩阵变欧柳尔轴
投送xyz变换矩阵
计算x和mulus近倍n之间的“距离”(绝对差)
粒子阵列空间和Epsilon质量算法
matlab工具箱四环和空间旋转
验证自IMU数据代码(Ex.MPU6050DMP)
函数旋转矩阵转换为四分位
重工作安装Shawn兰克顿机器人多机器人
Quarternion变换立方体动画
沿路点创建跨段基于三维网格插值xyz散射数据
C编译MATLAB函数对大型3D数据集快速四环旋转
使用四元执行矢量对另一矢量(或矢量)的一个或多个旋转
机器人定位地磁信号处理
选择网站
选择网站获取翻译内容基于您的定位, 我们推荐您选择 :.
也可以从下表选择网站
如何获取最佳网站性能
选择中国网站(中文或英文)最佳网站性能其它 MathWorks国家网站不优化访问
美洲
欧洲
亚太
联系本地办公