文件交换
Arduino电路板上运行模型。
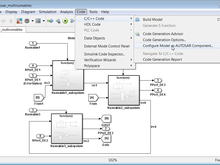
生成代码优化C2000单片机。
为意法半导体STM32处理器生成代码优化的基础
获取传感器和图像数据从您的覆盆子π。
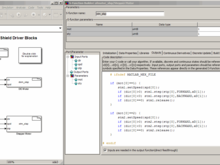
开发仿真软件设备驱动程万博1manbetx序块:循序渐进的指导和例子
覆盆子π上运行模型。
生成和部署代码为意法半导体STM32而言
生成代码优化Cortex-M处理器。
自定义目标Arduino和其他处理器
访问PX4与无人机自动驾驶仪外设工具箱并自动构建和部署飞行控制与嵌入式编码算法
Android设备上运行模型
苹果的iOS设备上运行模型。
特别提款权设计和原型系统使用Xilinx Zynq-based收音机
为汽车系统开发AUTOSAR软件组件。
生成代码的手臂部分zynq - 7000 SoC。
在乐高头脑风暴EV3运行模型。
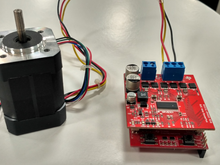
永磁同步电动机矢量控制与TI发射台和BOOSTXL-DRV8301
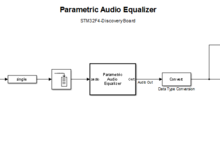
模型、原型、调整和部署算法STM32F4发现董事会。
定向控制与TI LAUNCHXL-F28069M BOOSTXL-DRV8301逆变器和2 pm马达
生成代码优化手臂Cortex-A处理器。
设计、分析和原型为德州仪器C2000微控制器
案例研究使用MathWorks工具做- 178
从MATLAB与BeagleBone黑色
生成代码的手臂Cortex-based烦恼单片机。
原型和测试软件定义无线电(SDR)系统使用USRP E310 MATLAB和Simulink仿真万博1manbetx
生成代码优化BeagleBone黑色。
使用Xilinx Zynq-based硬件设计和原型视觉系统
生成代码优化手臂Cortex-R处理器
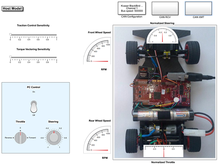
遥控赛车使用仿真软件编程,结合车辆动力学控制器,可以万博1manbetx
生成代码的手臂Cortex-A英特尔SoC平台的核心。
万博1manbetx支持低成本德州仪器发射点发动
Thsi目标支持包允许你万博1manbetx部署算法在TI发射台。
使用仿真软件模型提供了一个愉快的基于模型的设计经验与乐高机器人万博1manbetx
为XMC微控制器生成优化的代码
NXP FRDM-KL25Z生成和部署代码。
NXTway-GS基于模型的设计基于嵌入式编码器NXT机器人。
永磁同步电动机启动
为C6000 DSP生成代码优化。
嵌入式处理器编码器在循环(公益诉讼)目标大力神RM48单片机
NXP FRDM-K64F生成和部署代码。
生成代码优化TI协奏曲。
为Cortex-M生成优化的DSP算法代码。
演示如何使用MathWorks产品工作流中的arp - 4754 a, - s manbetx 845178 c nad做- 331
开发的仿真软件设备驱动程序块B万博1manbetxeagleBone黑色
你能够理解MBD过程与乐高R / C的车。
为了计算所需的太阳能板和电池容量计算器
万博1manbetx仿真软件(嵌入式编码器)目标TI Stellaris发射台
模型,配置和生成符合AUTOSAR的代码
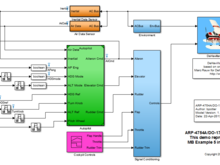
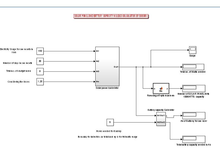
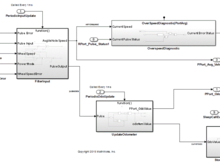
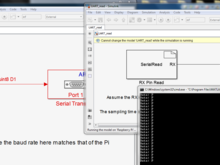
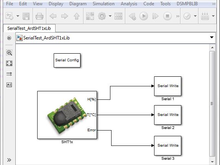
这个提交支持Arduino和树莓π之间的串行通信仿真软件。万博1manbetx
这一系列的实验室展示了如何合成音乐与仿真软件,然后目标TI C6000卡恩万博1manbetx
MATLAB / Simulink仿真和验证机之间的通信通万博1manbetx过UDP 10
非线性通用直升机模型基于以下NASA艾姆斯报告:“美国国家航空航天局tm - 84281”和“NASA tm - 85890”
这是一个年代的函数驱动MPC4725 I2C数字模拟12位转换器。
测试或控制覆盆子πIO别针Matlab GUI
MATLAB-to-C工作流实例在凯尔μVision IDE
教程写块薄层色谱
这个目标支持包允许你在Q万博1manbetxNX操作系统部署算法。
NXT SCARA基于模型的设计基于嵌入式编码器NXT机器人。
附加为嵌入式编码支持包臂Cortex-A / Cor万博1manbetxtex-M处理器
图书馆块SHT1x读取温度和相对湿度(%)从SHT1x传感器(°C)
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室