万博1manbetx基于Simulink的机械臂安全轨迹跟踪控制
Mihir Acharya, MathWorks
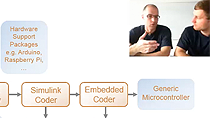
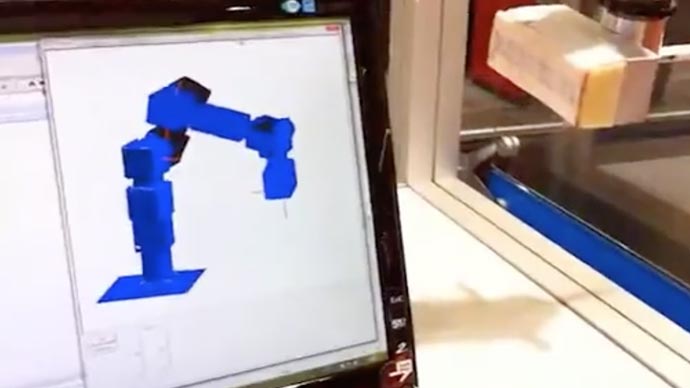
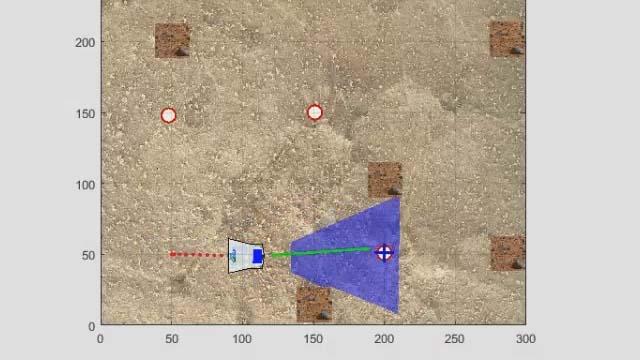
利用Simulink的基于模型的设计(Model-Based Design)可以设计、模拟和实现机器人操作器的算法万博1manbetx®块在机器人系统工具箱™。您可以很容易地实现Computed Torque Control等算法,该算法可以进一步用于执行人机协作的安全轨迹跟踪控制。
产品集中
其他资源
相关视频和网络研讨会













你也可以从以下列表中选择一个网站:
Mihir Acharya, MathWorks
利用Simulink的基于模型的设计(Model-Based Design)可以设计、模拟和实现机器人操作器的算法万博1manbetx®块在机器人系统工具箱™。您可以很容易地实现Computed Torque Control等算法,该算法可以进一步用于执行人机协作的安全轨迹跟踪控制。
你也可以从以下列表中选择一个网站: