b
频率响应的波德图,或幅值和相位数据
语法
描述
波德(sysN sys1, sys2,…)绘制同一曲线上多个动态系统的频率响应。所有系统必须具有相同数量的输入和输出。
例子
动态系统的伯德图
创建以下连续时间SISO动态系统的波德图。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);BODE(H)
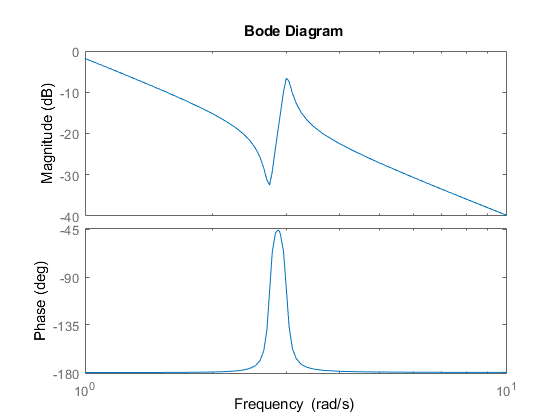
b根据系统动态自动选择情节范围。
指定频率的BODE绘图
在指定的频率范围内创建一个波德图。当您想要关注特定频率范围内的动态时,请使用此方法。
H = TF([ - 0.1,-2.4,-181,-1950],[1,3.3,990,2600]);BODE(H,{1,100})网格在
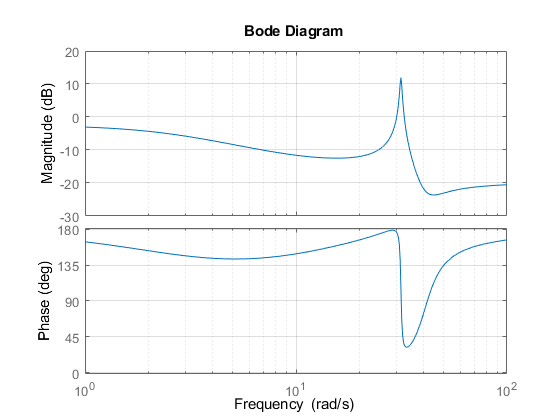
细胞阵列{1,100}指定BODE图中的最小和最大频率值。通过这种方式提供频率界限,该功能选择频率响应数据的中间点。
或者,指定一个用于评估和绘制频率响应的频率点向量。
W = [1 5 10 15 20 23 31 40 44 50 85 100];波德(H, w,“。”网格)在
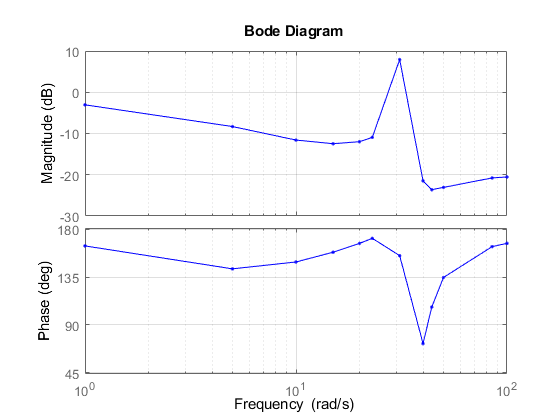
b仅在指定频率下绘制频率响应。
比较几个动态系统的Bode曲线
在同一波德图上比较连续时间系统和等效离散系统的频率响应。
创建连续时间和离散时间动态系统。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);高清=汇集(H, 0.5,“zoh”);
创建一个显示两个系统的Bode图。
BODE(H,HD)
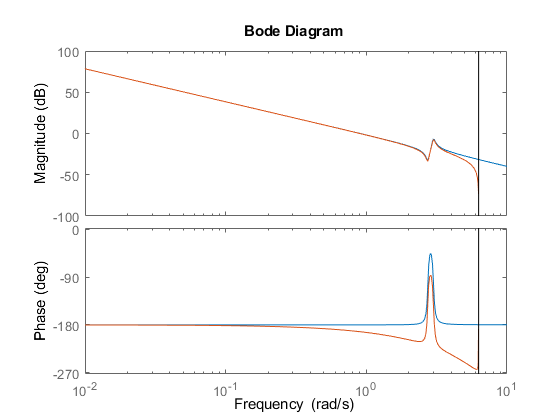
离散时间系统的波德图包括一条竖线,标记系统的奈奎斯特频率。
具有指定线属性的波德图
属性指定波德图中每个系统的线样式、颜色或标记LineSpec输入参数。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);高清=汇集(H, 0.5,“zoh”);波德(H,“r”高清,'B--')
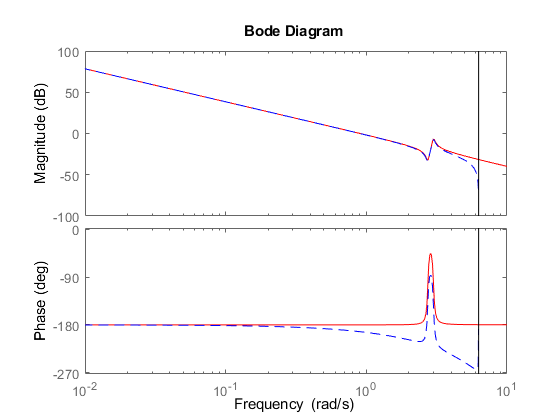
第一个LineSpec,“r”,指定响应的纯红色线H。第二个LineSpec,'B--',指定响应的蓝色虚线高清。
获得幅度和相位数据
计算SISO系统的频率响应的幅度和相位。
如果您没有指定频率,b根据系统动态选择频率,并在第三个输出参数中返回它们。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);(杂志、阶段、wout) =波德(H);
因为H是SISO模型,前两个维度莫和阶段均为1.第三维度是频率的数量wout。
大小(mag)
ans =1×3.1 1 41.
长度(wout)
ans = 41.
因此,每个条目沿着第三维度莫给出了在相应频率处的响应的大小wout。
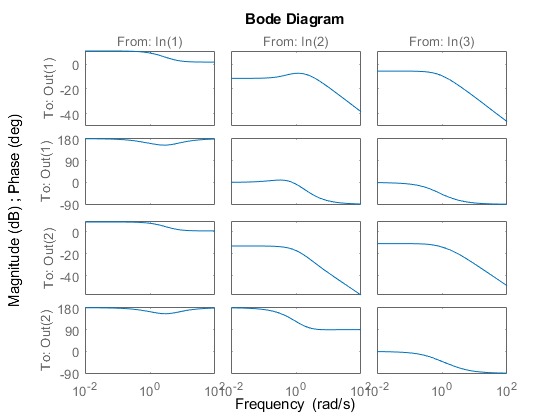
MIMO系统的级别和阶段
对于此示例,创建一个2输出3输入系统。
RNG(0,“旋风”);%的再现性H = rss(4、2、3);
对于这个系统,b在一个单独的图中绘制每个I/O通道的频率响应。
BODE(H)
计算这些响应在1到10弧度之间的20个频率的幅度和相位。
w = logspace(0,1,20);[Mag,阶段] = BODE(H,W);
莫和阶段是三维阵列,其中前两个维度对应于输出和输入尺寸H,第三维度是频率的数量。例如,检查尺寸莫。
大小(mag)
ans =1×3.2 3 20
因此,例如,杂志(1、3、10)从第三个输入到第一个输出的响应的大小,是否在第10个频率处计算w。同样的,阶段(1、3、10)包含相同响应的阶段。
鉴定模型的BODE图
比较从输入/输出数据识别的参数模型的频率响应,与使用相同数据识别的非参数模型的频率响应。
识别基于数据的参数和非参数模型。
负载iddata2z2;w = linspace(0,10 * pi,128);sys_np = spa(z2,[],w);sys_p = tfest(z2,2);
使用温泉和特遣部队命令需要系统识别工具箱™软件。
sys_np是一个非参数识别的模型。SYS_P.是一个参数识别模型。
创建一个包含两个系统的Bode图。
BODE(SYS_NP,SYS_P,W);传奇('sys-np','sys-p')
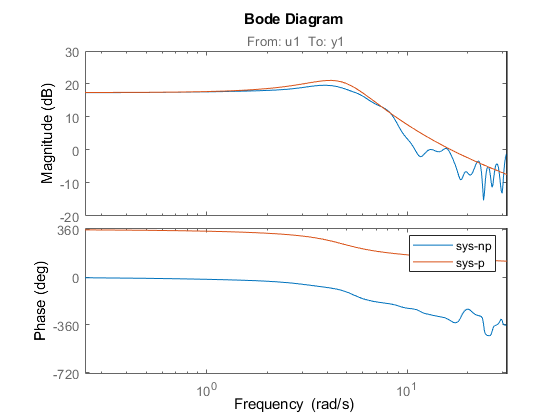
您可以通过右键单击绘图和选择,在Bode Plot上显示置信区>置信区域。
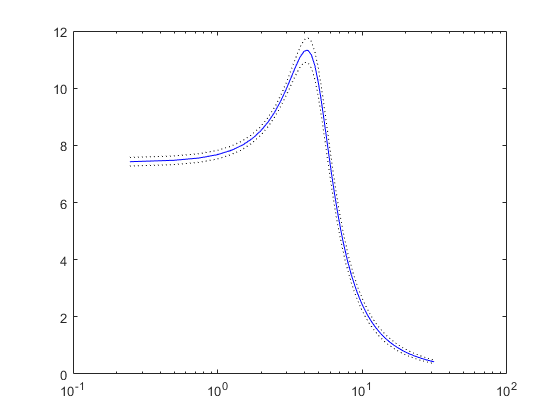
获得辨识模型的幅值和相位标准差数据
计算确定模型的幅度和相位的标准偏差。使用这些数据创建响应不确定性的3σ图。
根据数据确定传递函数模型。获得频率响应的幅值和相位的标准差数据。
负载iddata2z2;sys_p = tfest(z2,2);w = linspace(0,10 * pi,128);[mag,pH,w,sdmag,sdphase] = bode(sys_p,w);
使用特遣部队命令需要系统识别工具箱™软件。
SYS_P.为已确定的传递函数模型。SDMAG.和sdphase.包含频率响应的幅度和相位的标准差数据。
使用标准偏差数据创建一个与置信区域相对应的3σ图。
杂志=挤压(mag);sdmag =挤压(sdmag);semilogx (w杂志'B',w,mag + 3 * sdmag,凯西:”w mag-3 * sdmag,凯西:”);
输入参数
输出参数
提示
当您需要额外的情节定制选项时,请使用
bodeplot代替。
算法
b计算频率响应,如下所示:
您还可以从以下列表中选择一个网站:
