佩姆
预测误差最小化线性和非线性模型
描述
例子
精炼估计的状态空间模型
Estimate a discrete-time state-space model using the subspace method. Then, refine it by minimizing the prediction error.
Estimate a discrete-time state-space model usingN4SID, which applies the subspace method.
loadiddata7Z7;Z7a = z7(1:300); opt = n4sidOptions('重点','模拟');init_sys = n4sid(z7a,4,opt);
init_sys为估计数据提供73.85%的拟合度。
init_sys.report.fit.fitpercent
ANS = 73.8490
利用佩姆提高拟合的亲密关系。
sys = pem(z7a,init_sys);
Analyze the results.
比较(z7a,sys,init_sys);
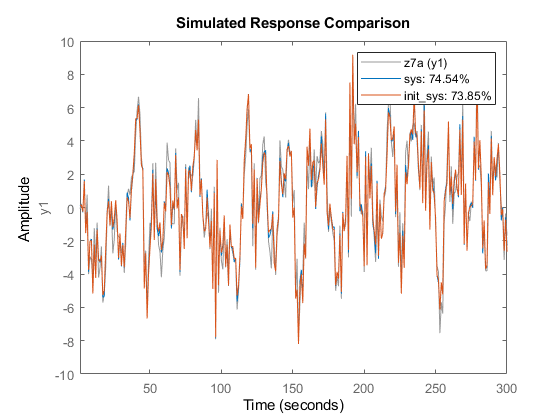
sysprovides a 74.54% fit to the estimation data.
估计非线性灰色盒模型
估计非线性灰色框模型的参数以适合直流电动机数据。
加载实验数据,并指定信号属性,例如开始时间和单位。
负载(fullfile(Matlabroot,,'工具箱',“身份”,'iddemos','数据','dcmotordata');data = iddata(y,u,0.1);data.tstart = 0;data.timeunit ='s';
配置非线性灰色框模型(艾德格里) 模型。
对于此示例,请使用dcmotor_m.m文件。要查看此文件,请输入edit dcmotor_m.mat the MATLAB® command prompt.
file_name ='dcmotor_m';顺序= [2 1 2];参数= [1; 0.28];onirom_states = [0; 0];TS = 0;init_sys = idnlgrey(file_name,order,parameters,initial_states,ts);init_sys.timeunit ='s';setinit(init_sys,'Fixed',{false false});
init_sysis a nonlinear grey-box model with its structure described bydcmotor_m.m。该模型具有一个输入,两个输出和两个状态,如命令。
setInit(init_sys,'recied',{false false})指定init_sysare free estimation parameters.
估计模型参数和初始状态。
sys = pem(data,init_sys);
sys是一个艾德格里model, which encapsulates the estimated parameters and their covariance.
分析估计结果。
compare(data,sys,init_sys);
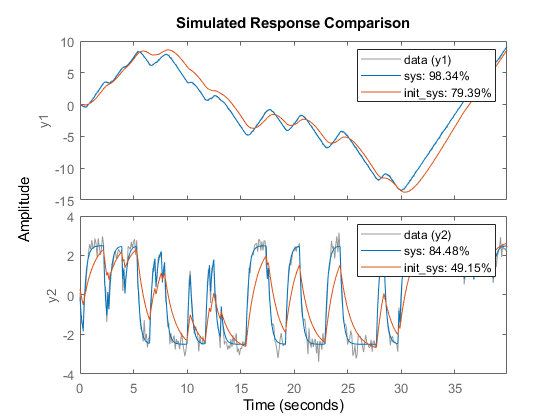
sys为估计数据提供98.34%的拟合度。
Configure Estimation Using Process Model
Create a process model structure and update its parameter values to minimize prediction error.
Initialize the coefficients of a process model.
init_sys = idproc('p2udz');init_sys.kp = 10;init_sys.tw = 0.4;init_sys.zeta = 0.5;init_sys.td = 0.1;init_sys.tz = 0.01;
TheKP,Tw,Zeta,Td, 和Tz系数init_sys用他们的初始猜测配置。
利用init_sys配置估计of a prediction error minimizing model using measured data. Becauseinit_sys是一个idprocmodel, useprocestOptions创建选项集。
loadIDDATA1Z1;opt = procestoptions('展示','on','SearchMethod','lm');sys = pem(z1,init_sys,opt);
Process Model Identification Estimation data: Time domain data z1 Data has 1 outputs, 1 inputs and 300 samples. Model Type: {'P2DUZ'} Algorithm: Levenberg-Marquardt search
------------------------------------------------------------------------------------------
Norm of First-order Improvement (%)
Iteration Cost step optimality Expected Achieved Bisections
------------------------------------------------------------------------------------------ 0 21.2201 - 414 3.8 - - 1 19.4048 1.15 323 3.8 8.55 7 2 14.8743 2.48 814 4.41 23.3 0 3 6.84305 0.873 451 4.43 54 11 4 5.20354 0.977 1.49e+03 8.75 24 7 5 1.83911 0.973 473 13 64.7 0 6 1.67582 0.225 20.3 4.98 8.88 0 7 1.67335 0.062 6.57 0.0829 0.147 0 8 1.67334 0.00494 0.0555 0.000374 0.000648 0 ------------------------------------------------------------------------------------------ Termination condition: Near (local) minimum, (norm(g) < tol).. Number of iterations: 8, Number of function evaluations: 42 Status: Estimated using PEM Fit to estimation data: 70.63%, FPE: 1.73006
检查模型拟合。
sys.report.fit.fitpercent
ANS = 70.6330
sys为测量数据提供70.63%的拟合度。
输入参数
Output Arguments
算法
PEM使用数值优化来最小化成本功能,预测误差的加权规范,定义为标量输出的如下:
wheree(t)is the difference between the measured output and the predicted output of the model. For a linear model, the error is defined as:
wheree(t)是向量和成本功能 是标量值。下标N表明成本函数是数据样本数量的函数,并且对于更大的值而言变得更准确N。对于多出输出模型,先前的方程式更为复杂。有关更多信息,请参见第7章System Identification: Theory for the User, Second Edition, by Lennart Ljung, Prentice Hall PTR, 1999.
替代功能
You can achieve the same results as佩姆通过为各种模型结构使用专用估算命令。例如,使用sest(数据,init_sys)for estimating state-space models.
选择一个网站
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:。
Select网站您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)