主要内容
计划和控制
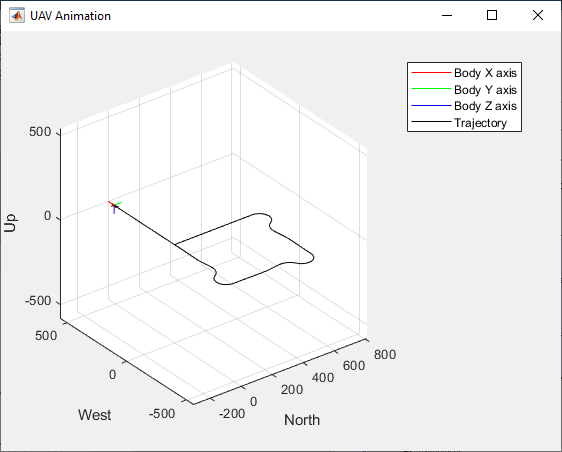
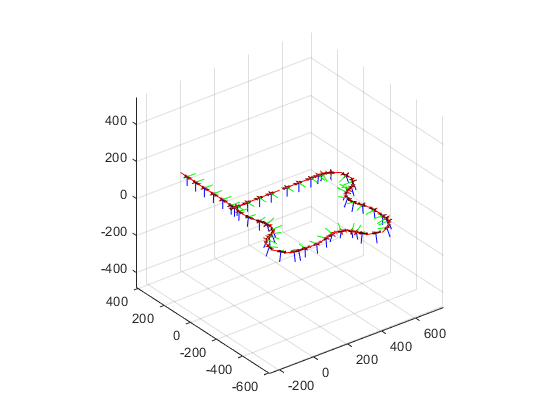
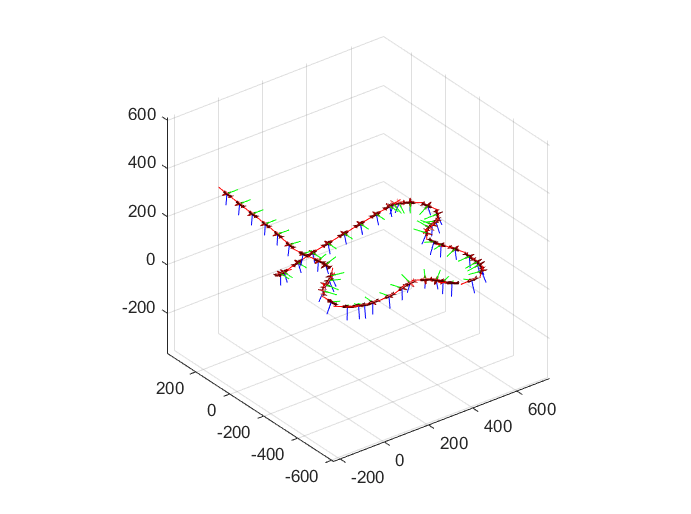
指导模型和导航,轨迹和航点追随
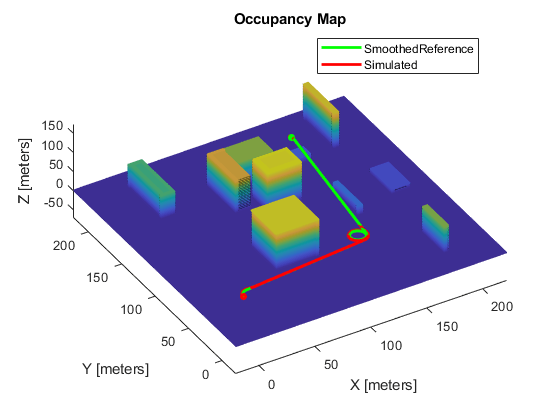
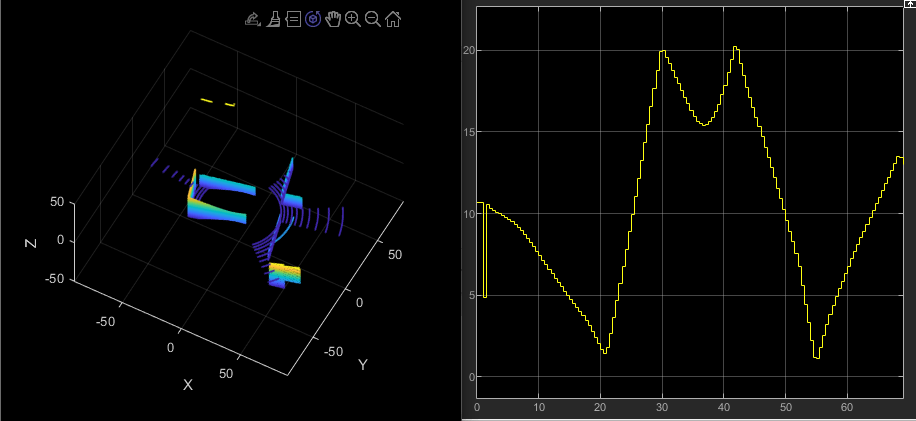
使用固定翼和多旋翼无人机的制导运动模型计划和执行无人机飞行。使用航路点和轨迹跟踪算法执行预定义任务。有关使用在城市设置中规划和模拟飞行的RRT路径规划器的示例,请参见基于RRT的固定翼无人机运动规划.
功能
特色的例子
你也可以从以下列表中选择一个网站:
使用固定翼和多旋翼无人机的制导运动模型计划和执行无人机飞行。使用航路点和轨迹跟踪算法执行预定义任务。有关使用在城市设置中规划和模拟飞行的RRT路径规划器的示例,请参见基于RRT的固定翼无人机运动规划.
你也可以从以下列表中选择一个网站: