pcfromkinect
点云Kinect为视窗
语法
描述
ptCloud= pcfromkinect (depthDevice,depthImage)depthDevice输入可以是avideoinput(图像采集工具箱)对象或一个imaq。VideoDevice(图像采集工具箱)对象配置为Kinect(版本1和版本2)的Windows®.
此功能需要支持Windows Kinect的Image Acquisition Toolbox™软件。万博1manbetx
ptCloud= pcfromkinect (depthDevice,depthImage,colorImage)colorImage输入。
用于Windows系统的Kinect,专为游戏而设计,生产depthImage和colorImage作为场景的镜像。返回的点云被校正以匹配实际场景。
ptCloud= pcfromkinect (depthDevice,depthImage,colorImage,对齐)
例子
绘制颜色点云Kinect为视窗
从Kinect图像中绘制一个彩色点云。这个例子需要图像采集工具箱软件、Kinect摄像头和摄像头的连接。
为颜色设备创建一个System对象™。
colorDevice = imaq。VideoDevice (“kinect”,1)
为深度设备创建一个系统对象。
depthDevice = imaq。VideoDevice (“kinect”, 2)
初始化摄像头。
步骤(colorDevice);步骤(depthDevice);
从设备加载一帧。
Colorimage =步骤(Colordevice);depthImage =步骤(depthDevice);
提取点云。
ptCloud = pcfromkinect (depthDevice depthImage colorImage);
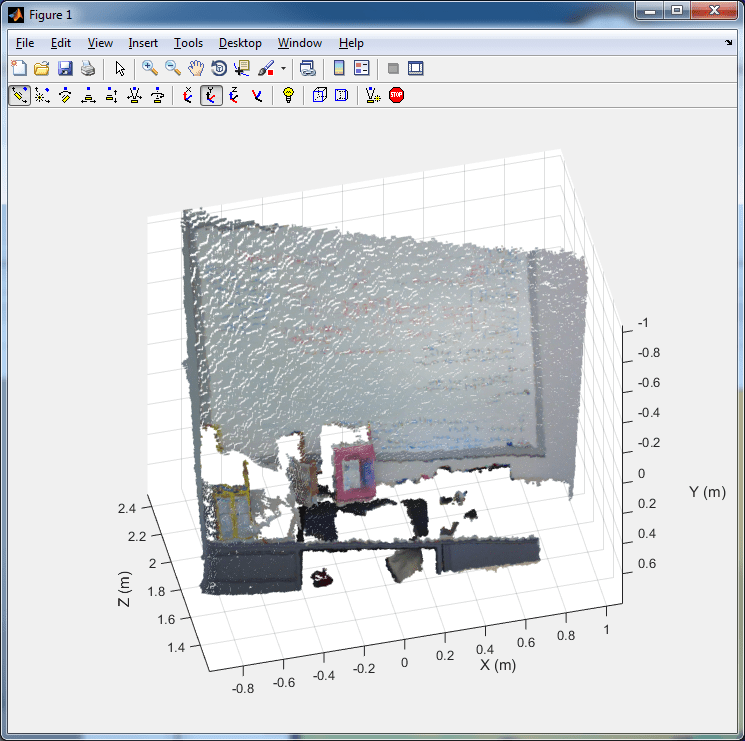
初始化点云播放器以可视化三维点云数据。坐标轴被适当地设置成Kinect中的点云。
球员= pcplayer (ptCloud.XLimits ptCloud.YLimits ptCloud.ZLimits,...'verticalaxis',“y”,“VerticalAxisDir”,'下');包含(球员。轴,'x(m)');ylabel(球员。轴,'y(m)');zlabel(球员。轴,“Z (m)”);
获取并查看500帧实时Kinect点云数据。
为i = 1:20 00 colorImage = step(colorDevice); / /将图像转换为depthImage =步骤(depthDevice);ptCloud = pcfromkinect (depthDevice depthImage colorImage);视图(球员,ptCloud);结束
释放对象。
发布(Colordevice);释放(深度);
输入参数
depthDevice- - - - - -输入视频对象
videoinput对象|imaq。VideoDevice对象
输入视频对象,指定为videoinput(图像采集工具箱)对象或一个imaq。VideoDevice(图像采集工具箱)配置为Kinect for Windows。
depthImage- - - - - -深度图像
米——- - - - - -N矩阵
深度图像,指定为米——- - - - - -N像素矩阵。原始图像,depthImage和colorImage,来自Kinect是场景的镜像。
Kinect深度摄像头的范围有限。Kinect深度摄像头的范围有限,可能会导致深度图像中的像素值没有相应的三维坐标。这些缺失的像素值被设置为南在里面位置返回点云的财产。
数据类型:uint16
colorImage- - - - - -彩色图像
米——- - - - - -N-by-3 RGB真彩色图像
彩色图像,指定为一个米——- - - - - -NKinect返回的-by-3 RGB真彩色图像。原始图像,depthImage和colorImage,来自Kinect是场景的镜像。
数据类型:uint8
对齐- - - - - -图像坐标系的方向
“colorCentric”(默认)|“depthCentric”
图像坐标系统的方向,指定为字符向量“colorCentric”要么“depthCentric”.将此值设置为“colorCentric”对齐depthImage与colorImage.放对齐来“depthCentric”对齐colorImage与depthImage.
右撇子世界坐标系的起源位于深度相机的中心。的x坐标系的轴向右侧,右侧y- 轴向下降,而且z-轴点从相机。

请注意
对于计算机视觉工具箱™使用的坐标系统的一致性,该函数定义的坐标系统与Kinect骨骼元数据定义的坐标系统是不同的。
输出参数
另请参阅
pcdenoise|pcdownsample|pcfitplane|PCMerge.|pcplayer|pcread|pcregistericp|pcshow.|PCWRITE.|planeModel|plot3|pointCloud|reconstructScene|scatter3|三角化
您还可以从以下列表中选择一个网站:
