编程场景创作
通过使用一个以编程方式创建驾驶场景
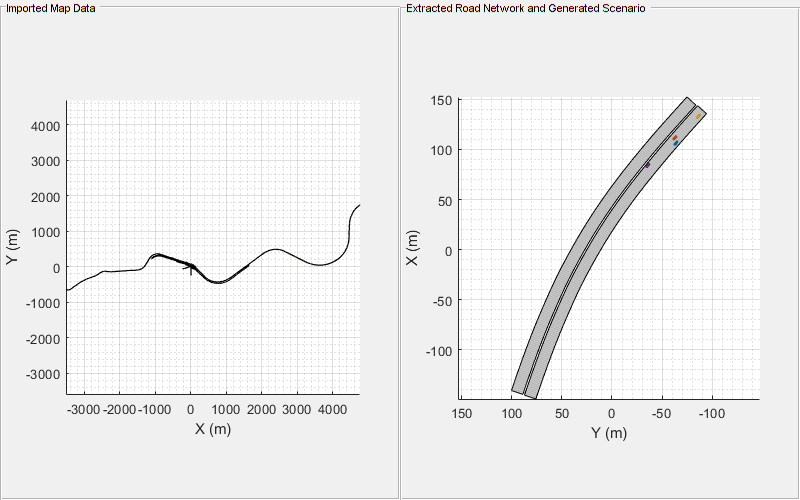
drivingScenario对象的drivingScenario对象允许您从MATLAB作者驾驶场景®命令行。使用这个对象来设计复杂的道路网或停车场和指定的演员和他们的轨迹。你可以从这些场景生成合成数据通过使用传感器模型和可视化数据上鸟瞰的阴谋。
的灵活的接口drivingScenario对象允许您创建迅速变化的场景测试算法在各种条件下开车。更多细节,请参阅通过编程方式创建驾驶场景变化。
功能
主题
驾驶场景
- 以编程方式创建驾驶场景
以编程方式创建地面实况驾驶场景合成传感器数据和跟踪算法。 - 定义道路布局以编程方式
以编程方式创建道路路口和组合这些连接来创建更复杂的公路网络。 - 模拟驾驶场景中车辆停车操作
模拟停车操作并生成传感器检测在一个大型停车场使用长方体驾驶场景。 - 通过编程方式创建演员和车辆轨迹
以编程方式创建演员驾驶场景和车辆轨迹。 - 通过编程方式创建驾驶场景变化
以编程方式创建驾驶场景的变化,建成使用驾驶场景设计师应用程序。 - 可视化传感器覆盖范围、检测和跟踪
配置和使用一个鸟瞰的情节显示传感器的覆盖范围,在自我的车辆检测和跟踪结果。 - 自动化控制的智能车辆通过Stateflow图表
模型与智能车辆高速公路场景,由决策逻辑控制由Stateflow定义®图表。
传感器
- 模型的雷达传感器检测
模型和模拟驾驶汽车雷达传感器的输出各种场景。 - 雷达信号模拟和处理自动驾驶
模型的硬件、信号处理和传播环境的雷达驾驶场景。 - 由于多路径返回模拟雷达鬼魂
生成鬼目标反射信号能量时发生的另一个目标然后返回雷达。 - 模型视觉传感器检测
模型和模拟汽车视觉传感器的输出为各种驾驶场景。 - 从驾驶场景模拟惯性传感器读数(导航工具箱)
从IMU生成合成传感器数据、GPS和车轮编码器利用自动驾驶的驾驶场景生成工具的工具箱™。