主要内容
PCFitsphere.
适合球体到3-D点云
句法
描述
模型= pcfitsphere(ptcloudin那Maxdistance.)
该函数使用M估算器样本共识(MSAC)算法来找到球体。MSAC算法是随机样本共识(RANSAC)算法的变体。
[另外,在点云输入中的Inlier和异常值点返回线性索引。模型那inlierindices那uterierindices] = pcfitsphere(ptcloudin那Maxdistance.)
[___那另外,使用任何前面的语法返回模型到模型的距离的平均误差。意思是] = pcfitsphere(ptcloudin那Maxdistance.)
[___] = pcfitsphere(___那使用一个或多个指定的其他选项名称,价值)名称,价值对论点。
例子
从点云中检测球体
加载数据文件。
加载('Object3d.mat');
显示原始点云。
图pcshow(ptcloud)xlabel('x(m)')ylabel('y(m)')Zlabel('z(m)')标题('原始点云')

为球形配件设置最大点对角距离1cm。
maxdistance = 0.01;
设置ROI以约束搜索。
ROI = [-INF,0.5,0.2,0.4,0.1,INF];Sampleindices = FindPointsinroi(Ptcloud,ROI);
检测球体,地球,并从点云中提取它。
[Model,Inlierindices] = PCFitsphere(PTCloud,MaxDistance,......'Samemindices',样品暗物典);Globe = Select(PtCloud,Inlierindices);
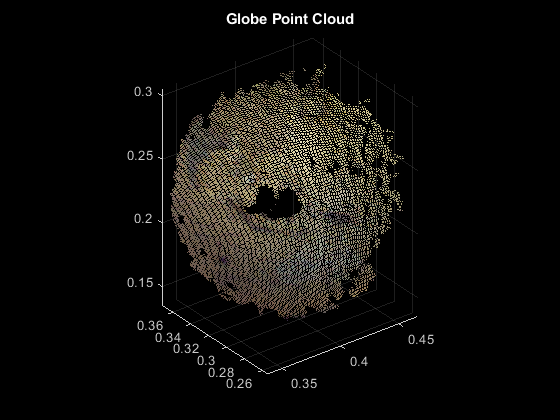
绘制地球。
保持上情节(模型)

图PCSHOW(GLOBE)标题(“全球点云”)
输入参数
输出参数
参考资料
[1] Torr,P.H. S.和A. Zisserman。“MLESAC:一种具有应用于估计图像几何的新的强大估算器。”计算机视觉和图像理解。2000年。
扩展能力
也可以看看
Affine3d.|pcdenoise.|pcfitcylinder|PCFitplane.|PCMerge.|PCPlayer.|p|Pcregistericp.|pcshow.|pctransform.|PCWRITE.|PlaneModel.|pointcloud.
话题
在R2015B中介绍
您还可以从以下列表中选择一个网站:
