文件交换
接触力的例子和图书馆。
风力涡轮机模型包括叶片、发动机舱,俯仰和偏航驱动,发电机和控制系统。
延长Simscape跨越多个物理域多体模型和物理效应。
所有文件为学生竞赛,物理建模培训
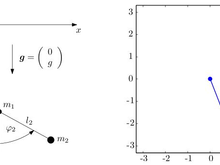
利用欧拉方程推导出微分方程
参数化零件Simscape多体,齿轮总成和铝型材的MATLAB代码
电流控制π增益调优,速度闭环控制,转矩控制,流量控制弱化……
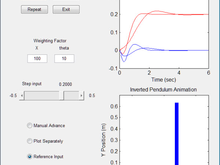
MATLAB文件的集合,用于分析倒立摆&设计控制器。
Simscape车辆多体模型建模系列
一维弹簧元件有限元代码
模型和模拟的物理组件和斯图尔特平台的综合控制器。
万博1manbetx仿真软件模型和CAD文件中使用这个网络研讨会:移动机器人避碰仿真
机械臂转移两个传送带之间的部分
滑移模型,包括液压致动器的胳膊,桶倾斜和多体动力学。
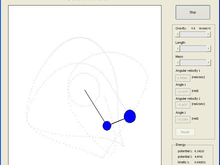
显示动画双摆(大部分)的混沌行为。
表示du potentiel de MATLAB在干部de la modelisation multi-physique
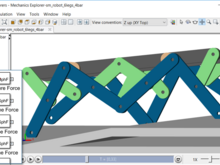
剪刀升降机由参数化库,可重用的组件,液压执行机构。
集总参数和状态空间方法对静态、模态和动态分析
项目描述simmechanics之间的联系和虚拟现实模拟机器人手臂
车辆模型Simscape多体使用三维轮胎模型。
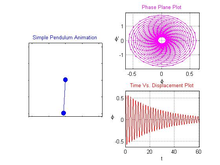
模拟非线性单摆
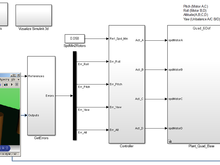
建模、分析和部署扶轮摆系统
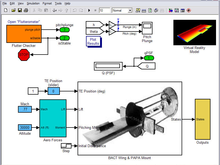
模型2自由度翼使用SimMechanics™。
赛格威与simmechanics模型构建的一部分。
动画的倒立摆控制系统等方面
一套完整的数学运动学和动力学,Matlab, Simmechanics UR5机器人模型
这是一个系统描述倒立摆的理论
这个模型是我的Quadrotor项目的一部分
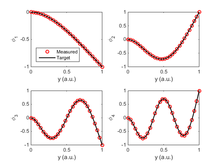
行式结构的模态参数估计在时域使用位移记录。
模糊控制的ip
宏观肌肉模型仿真软件万博1manbetx
四架飞机简单工厂模式和PID控制器
模拟双摆的函数是GUI。
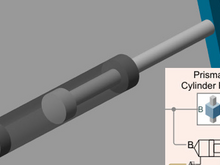
致动器与理想、液压和电气设计。
这是球板Simscape模型,控制和诊断。硬件有两个伺服系统作为输入和球的位置作为输出
这个演示文件显示了PID控制器设计新功能在MATLAB和Simullink和调优。
该模型模拟车辆使用仿真软件和Simscape的四分之一。万博1manbetx
双离合变速器与MATLAB脚本优化转移计划。
风速时程模拟空间相关
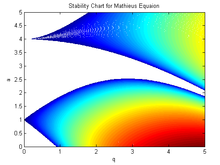
马蒂厄方程的数值和相平面分析/参量振荡器
升降台液压驱动,由模拟电路控制,3 d剪刀机制。
MATLAB代码来构建一个Simscape多体模型的一个链接和一个多连杆摆
第2部分文件的物理建模汽车学生在线培训团队
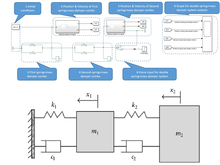
模型的多自由度弹簧质量阻尼系统状态空间矩阵a, B, C, D。
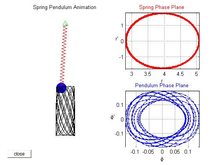
模拟非线性弹簧摆的
这个示例这个示例显示了简单的倒立摆控制等方面
快MatLAB函数nonlinear-inelastic对比分析应用的振荡器。
这包括演示文件中使用的网络研讨会……
模拟双和耦合摆
3自由度陀螺psysical抽筋转轮模型
工具探索Simscape™仿真数据和零交叉统计,在MATLAB中创建®代码
技术论文和例子在SimMechanics建模的灵活性。
情节双摆动力学,直到停止
使用SimMechancs滚动球的模型飞机。
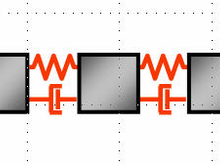
的三个质量和四个弹簧。了位置和速度的情节。
离散傅里叶变换时相比,双集成技术将加速度转换为位移记录
这是一个经典的模型使用Simscape双质量弹簧系统
所有文件“介绍接触建模”相关的视频
这是一个主动磁轴承系统的永磁同步电机。
q学习如何和平衡一个钟摆摆动。了良好的注释代码与动画。
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室