PID控制器整
控制系统工具箱™软件提供了多种工具和整定PID控制器的命令。要选择适合您应用的最佳工具,见选择一个PID控制器的设计工具。
有关在Simulink调谐PID控制器的信息万博1manbetx®模型,看基于模型的PID控制器整(万博1manbetxSimulink的控制设计)。
应用
| PID调节器 | 调整PID控制器 |
现场编辑任务
| 调整PID控制器 | 调整PID控制器在实时编辑LTI厂 |
功能
pidtune |
对于线性工厂模型PID整定算法 |
pidtuneOptions |
定义选项pidtune命令 |
getPIDLoopResponse |
与PID控制器的系统闭环和开环反应 |
pidTuner |
开放PID调谐器,用于调谐PID |
主题
PID调节基础知识
控制系统工具箱软件提供了设计PID控制器的工具。
PID调节器,可以执行PID控制器的自动,互动调整。
控制系统工具箱PID调节工具可以生成和调整许多PID和2自由度PID控制器的类型。
互动PID调节
调整PID控制器,以满足上升时间和稳定时间要求。
PID调节是参考之间跟踪和扰性能的折衷。此示例示出了如何以调谐到使用PID调谐器时有利于一个或另一个。
使用调PID控制器任务为线性的工厂模型设计PID控制器实时编辑器来生成代码。
PID调谐器提供了系统响应曲线和其它工具整定PID控制器。
命令行PID调节
编程调使用PID控制器pidtune命令。
使用的优化选项pidtune命令以有利于参考跟踪或扰动抑制在命令行。
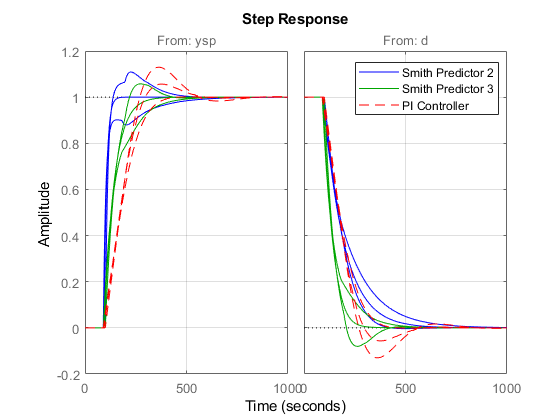
设计两个PI控制器使用的级联控制系统pidtune命令。
从测量的响应数据PID控制器设计
如果您有系统辨识工具箱™软件,您可以使用PID调节器来估计基于从系统测量响应数据的线性设备模型。PID调谐器调谐然后对所得到的模型的PID控制器。
使用实时编辑器任务以用于调谐根据测量的植物响应PID控制器生成代码。
系统识别是估计要控制的系统的动态表示的基础上,系统响应于已知激发的过程。
双学位的自由度PID控制器
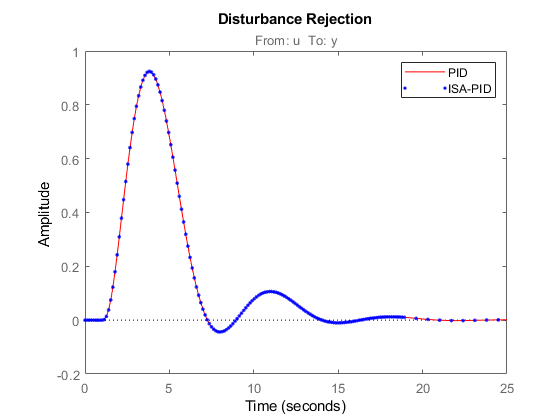
设计一个两自由度的自由度(2- DOF)PID控制器,并比较与1-DOF PID控制器的控制器的性能。
设计一个两自由度的自由度(2- DOF)PID控制器,并比较与1-DOF PID控制器的控制器的性能。
在调整万博1manbetx
您可以调整的收益PID控制器块以实现坚固的设计,使用PID调谐器所需的响应时间。
此示例示出了如何调整PID控制器植物不能被线性化。
当你的设备不能线性化,你可以使用频率响应估计估计工厂模型并导入工厂模型为PID调节器。
精选示例
您还可以选择从下面的列表中的网站:
