机器人研究人员和工程师使用MATLAB®和仿真软万博1manbetx件®设计、模拟和验证自主系统的各个方面,从感知到运动。
- 建模机器人系统,精确到最精细的细节,如传感器噪声和电机振动。
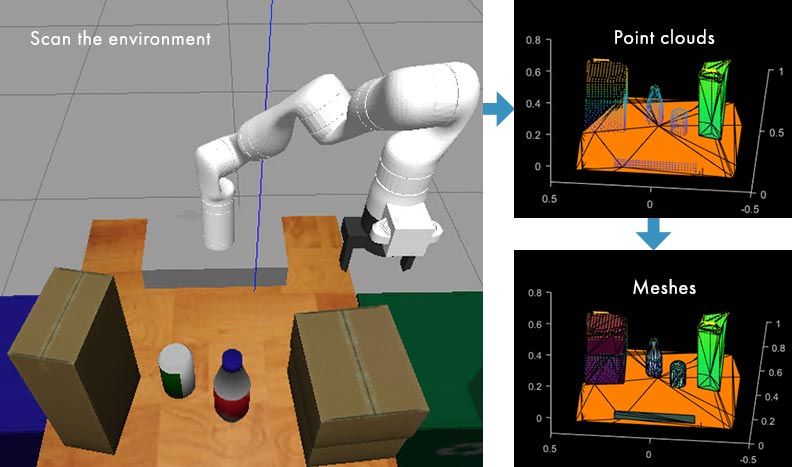
- 用精确的运动学、动力学和接触特性模拟机器人系统。
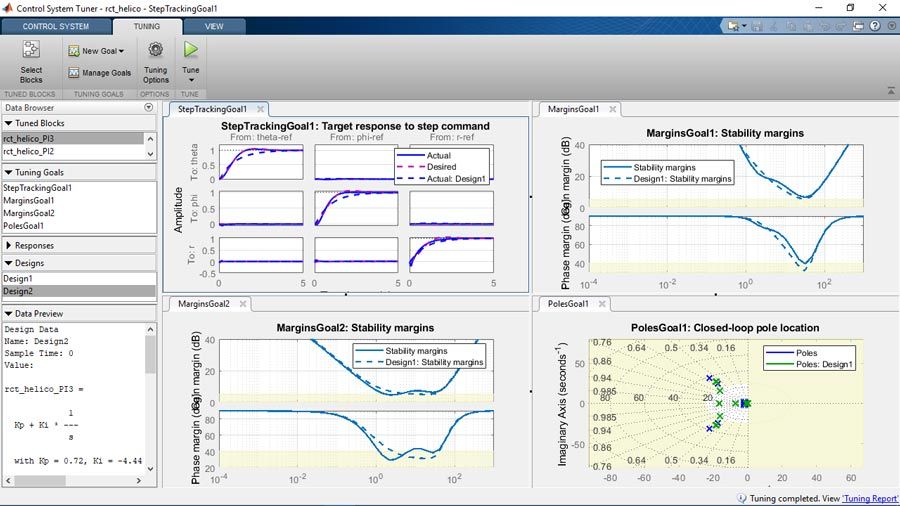
- 设计和优化高层自治和低层控制。
- 用一个维护的算法库综合和分析传感器数据。
- 逐步验证机器人设计或算法,从仿真到硬件在环(HIL)测试。
- 通过ROS将算法部署到机器人或直接部署到微控制器、fpga、plc和gpu。
“基于模型的设计和自动代码生成使我们能够处理敏捷Justin的53个自由度的复杂性。如果没有基于模型的设计,就不可能为如此复杂的具有硬实时性能的机器人系统构建控制器。”
Berthold Bäuml,德国航空航天中心(DLR)



探索产品s manbetx 845
处理传感器数据
在MATLAB和Simulink中使用强大的工具箱实现传感器数据处理算法。万博1manbetx
- 通过ROS、Serial和其他类型的协议连接到传感器。
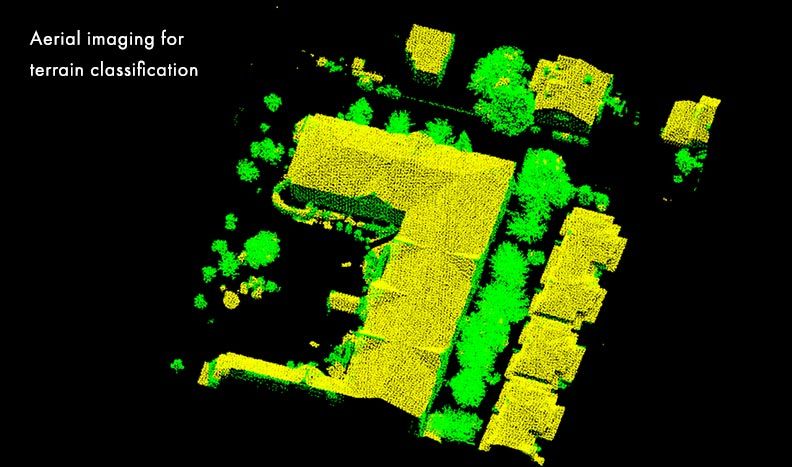
- 可视化来自摄像头、声纳、激光雷达、GPS和imu的数据。自动化常见的传感器处理任务,如传感器融合、滤波、几何变换、分割和配准。
与平台和目标沟通
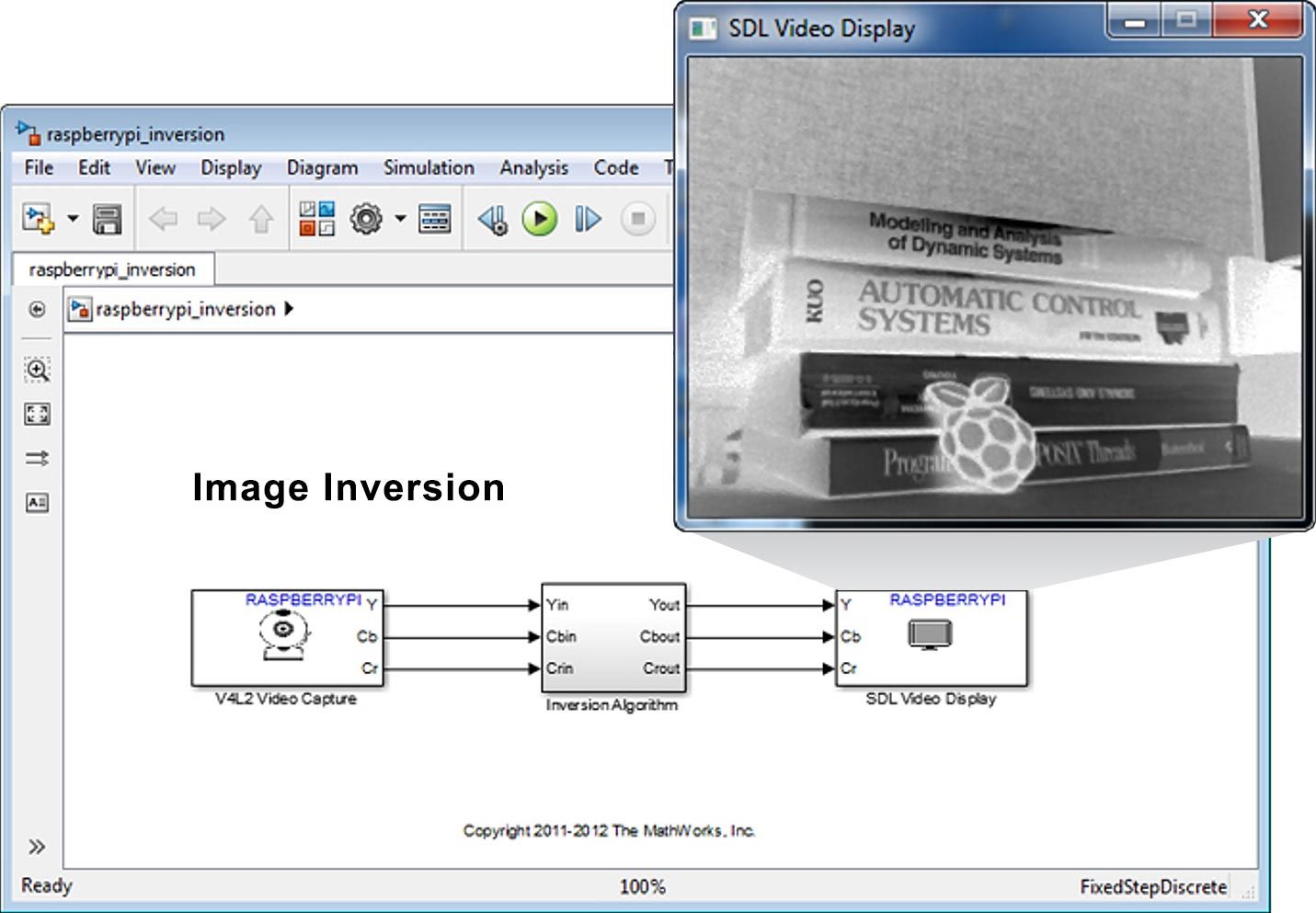
将自主算法部署到基于ros的系统和Arduino等微控制器上®树莓派™。通过CAN、EtherCAT等协议与嵌入式目标通信®, 802.11™,tcp / ip, udp, i2c, spi, modbus®、蓝牙®.
“通过MATLAB和Simulin万博1manbetxk,我们可以使用单一的环境进行控制算法开发、调试、数据分析等,而不是在多个工具之间切换。这种集成减少了整个项目开发时间和引入错误的机会。”
约翰·温博士,伦斯勒理工学院

30天免费试用
开始
有问题吗?
和机器人专家谈谈。
您也可以从以下列表中选择一个网站: