文件交换
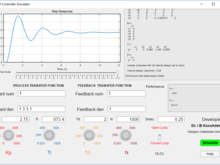
PID控制器模拟器的LTI系统w / w / o输入延迟
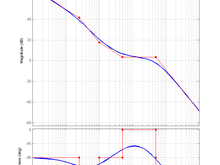
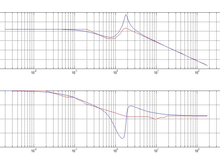
波德图与渐近线
赫维茨判据主要告诉我们许多波兰人位于左平面,右手P
FOMCON MATLAB工具箱是专用于分数阶动态系统的建模和控制。
基本的卡尔曼滤波器,大量评论认为,对于初学者来说卡尔曼滤波。
简单的M文件转换符号方程/多项式ZPK特遣部队的形式。
分数阶系统的FOTF工具箱
返回象征性劳思数组多项式。
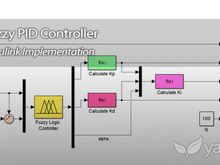
设计和实现模糊PID控制器的增益调度的仿真软件万博1manbetx
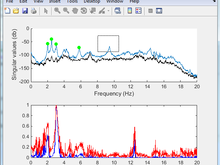
光谱和polyspectral分析,时频分布。
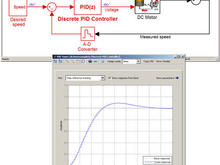
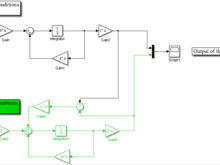
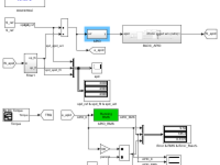
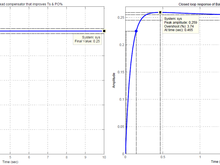
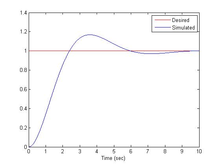
该文件显示了PID控制器优化在MATLAB和Simullink直流电机控制。
用MATLAB应用于实验
确定一个嘈杂的正弦函数的参数
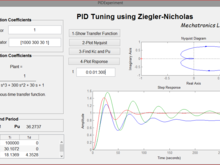
GUI容易发现P、PI和PID收益使用齐格勒尼古拉斯
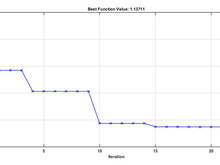
通过使用PSO tunining PID控制器
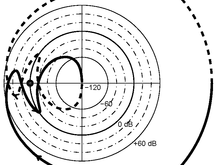
对数比例尼奎斯特图:查看问题由于接近无限振幅是可以避免的。
李雅普诺夫指数估计算法的Matlab版本狼et al .,自然史16 d, 1985。
的Matlab计算程序开发一个通用的用户定义的模型的灵敏度指标
模型中使用的“理解卡尔曼滤波器,第6部分:如何使用卡尔曼滤波仿真软件”视频万博1manbetx
这个应用程序处理转会函数的渐近波德图W (s)
这些文件与文本与MATLAB控制和估计,第五版
一个例子,一个观察者设计一个可观测状态空间系统。
为连续时间动态系统分岔图分析的基础上局部极大值和极小值
分析计算有限螺线管的磁场(这也是圆柱形磁体领域)和立方形的磁铁
特遣部队
无刷直流电机控制使用PI控制器
这个版本的文件,juryC。m,执行程序的详细解释。使用test_juryC测试功能。
提供了一个方程的非线性分数阶PID控制器参数。
这个文件共享的想法如何设计和开发一个自适应PID控制的速度刷汽车尽管扭矩变化
球和光束控制使用铅补偿器和PD控制器。
显示了一个模拟温度的控制与PID控制器的使用。
卡尔曼滤波和扩展卡尔曼滤波器的例子对INS / GNSS导航、目标跟踪,terrain-referenced导航。
混沌检测的实现完成确定李雅普诺夫指数。
这个函数经过的过程建立一个Routh-Hurwitz表来确定信息系统的/稳定。
分数阶比例积分微分控制器调谐器
一个完整的注释脚本解释线性卡尔曼滤波的一个简单的例子。
电力系统状态估计使用加权最小二乘法
配套软件
模型中使用的“理解卡尔曼滤波器,第7部分:如何使用扩展卡尔曼滤波仿真软件”视频万博1manbetx
在MATLAB / SIMULINK仿真加载频率控制万博1manbetx
这个文件夹包含的文件来模拟PID控制器为一阶时滞系统
一个非常简单和有效的方法来构建一个在单个m.code PID控制器
MATLAB文件的集合,用于分析倒立摆&设计控制器。
球轴承可以有几个缺点,导致不同的信号。这个程序显示了这个。
丰富的象征性polinomials数组。它在Matlab中央是不同的类似的功能。
这个MATLAB代码实现了FDD技术输出模态分析
计算估计的李雅普诺夫指数的逻辑映射值r间隔内(3.5 4)
最优模糊逻辑控制器使用Particel群优化
这个GUI解决Routh-Hurwitz稳定性判据
sssMOR是模型的MATLAB工具箱订单减少大规模动态系统的状态空间
简单的程序(可以普遍用于各种应用程序)
检查使用Routh-Hurwitz标准的稳定系统
Multivarialbe控制工具箱
提高转换器的输出由pi控制器控制
这段代码计算时间序列的最大李雅普诺夫指数与Rosenstein算法。
直升机控制系统的简单设计
这个演示文件显示了PID控制器设计和调优功能在MATLAB和Simullink。
2变电站直流牵引系统,列车之间移动3客运站建模
Routh-Hurwitz代码
提供了一种分数阶PID控制器的传递函数参数。
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室